Can I ask if the BLHeli ESC telemetry improvements made it to Plane 3.8.5 ?
Having a closer look to EK2 , it seems that for copter Lidar is used as primary height source when two conditions are achieved: altitude below EK2_RNG_USE_HGT and speed below EK2_RNG_USE_SPD .
This allows the copter hovering at slow speeds close to the ground.
The problem for plane is that the maximum speed accepted by EK2_RNG_USE_SPD is actually 6 m/s .
6 m/s as maximum speed is fine for a copter but it is too much slow for a plane.
So it looks to me that raising EK2_RNG_USE_SPD max value to a greater value should allow the Lidar as primary height source while in Auto mode.
no, the BLHeli changes aren’t in 3.8.5, but will be in the 3.9.x beta that I will release soon
1 Like
Hi, did you have any luck with adding this to 3.9? https://github.com/ArduPilot/ardupilot/issues/818#issuecomment-384060026
Great news ! Can I also ask how/when that change will filter through to the various ports such as the BeagleBoneBlue version ?
I think using LIDAR or other downward looking altitude detection scheme is not the best choice for a forward moving aircraft. In Tactical Aviation, the Radar Altimeter is good up to 20,000ft, but isn’t reliable for forward terrain navigation , because the only thing it can see is the terrain you just smacked into. I’m not sure your purpose of wanting to use LIDAR for altitude keeping, but hopefully it isn’t for terrain following. If you’re using it to maintain an “average height above ground” then fine, but really the only way to fly safely is to fly high enough above all the terrain anyways, so all you’re really doing is wasting energy changing altitude, and oh by the wya, making the current altitude of the aircraft variable, and therefore less predictable by other craft in the area.
The use of SRTM is the best “cheap” way to do terrian following. It is the 4th backup (to be used for situational awareness only) in applications I’ve helped design on tactical aircraft, and even that is supplemented with Electronic CHUM that’ll hopefully keep you from running into towers and telephone wires…even that isn’t good enough. The only REAL solution to terrain following is a high precision forward looking radar.
SRTM is probably adequate, as long as you recognize its limitations and maintain good height, knowing that the database is flawed. Then you can build terrain awareness charts (and guidance) off of that.
1 Like
Good to see the code developing, looking forward to the next release, how do I become an annual contributor to help ensure the code can keep developing ?
I have a feeling that Lidar use for altitude monitoring is never intended to avoid the terrain itself; rather it is just a reference for keeping a fairly constant altitude that can compensate for any inaccuracies of SRTM, baro drift, or GPS glitches. Maybe using lidar as an altitude reference should only be able to be called in automatic mode during a mission or have some more caveats.
I need lidar because I need to maintain 50ft AGL on mostly flat terrain, but 40 or 60ft won’t cut it. My flight times will probably push 4 hours, so baro is out. GPS can drift too, plus SRTM is pretty sparse on resolution.
1 Like
Flew tactical jets for nearly 20 years. RALT is only good to 5K FT. Used only for situational awareness.
SRTM resolution is pretty darn good, but altitude accuracy is ±10 meters or more. Certainly not sufficient for your needs.
Newer CARAs we put on the c130s a few years back is good to 25000. Old ones
were 5k though
@lordneeko
Lidar is essential to have a real altitude during landing approach .
Hope this image wil explain the reason why IMO we need Lidar for low altitude flight
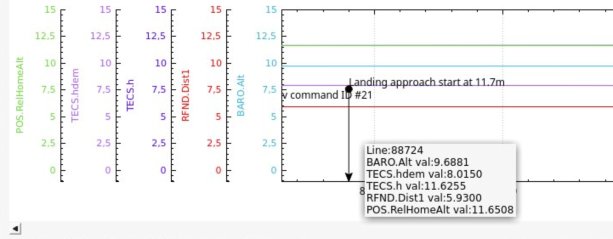
As you can see during this landing approach the Autopilot thinks that it is flying at 11,6 meters while in fact it is flying much lower at 5,9 meters.
This is a very common situation where Ek2 evaluation on height is totally wrong.
As I wrote before , why not allow the use of Lidar as for Arducopter where Lidar is automatically used by EK2 when altitude is below EK2_RNG_USE_HGT and speed below EK2_RNG_USE_SPD ?
The problem for plane is that the maximum speed accepted by EK2_RNG_USE_SPD is actually 6 m/s, raising EK2_RNG_USE_SPD max value to a greater value than 6 m/s should allow the Lidar as primary height source also while in Auto mode.
@tridge
Finally it seems that Lidar is already expected to be used as primary height source by EK2 at a certain altitude that the user can select based on Lidar capabilities but the EK2_RNG_USE_SPD limited to max 6 m/s seems to prevent it .
Is it a bug or is it intentional to not allow the use of Lidar ?
Totally agree that LIDAR is essential for aiding a self contained approach.
RadAlt is an essential sensor as well.
@tridge Any thing on the pipeline to include ETS airspeed sensor in the next release. I can do the testing on a beta code if possible.
I have posted on the Git too. Here it is https://github.com/ArduPilot/ardupilot/issues/8288
Thanks in advance.
1 Like
Where can I download this today? Mission Planner bugs when I select 3.8.5 under previous firmware. I can only find latest dev builds in the historical repo. Can anyone help with this?
So in conclusion, lidar height estimation can’t be used for planes in auto mode for landing?
Lidar work well for landing in plane.
The place it does not get used is flying… as in terrain following.
I have a TFmini Plus lidar with 7m outdoors measuring, last weekend I tried to do my first autolanding but my Pixhawk Cube just looks to barometric height instead of lidar height when landing, I set the flare point at 3m from ground but in every landing attemp flare height was different. That’s why I suppose Pixhawk is looking to baro’s height instead of lidar’s height. Lidar is showing height perfectly.
I already set a NAV_LAND command at the end of the mission, RNGFND_LANDING=1 and all LAND_XXX AND TECS parameters to land, Am I missing something else? should I change from EK2 TO EK3?
Should I also set this parameters:
EK2_ALT_SOURCE: Primary altitude sensor source
EK2_RNG_USE_HGT: Range finder switch height percentage
EK2_RNG_USE_SPD: Range finder max ground speed.
Thank you!
Thank you for the file, I will do some testing later and will report news.