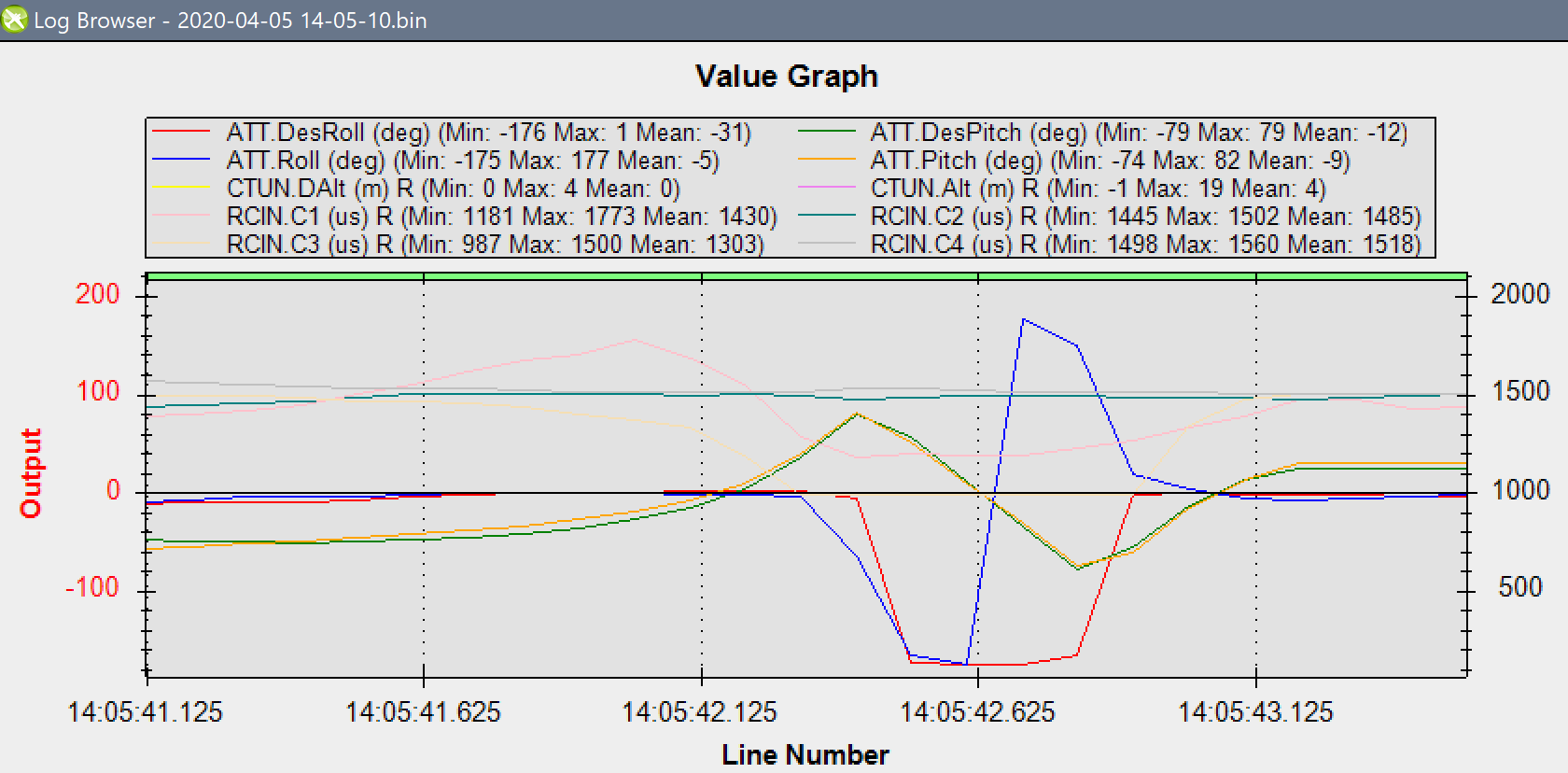
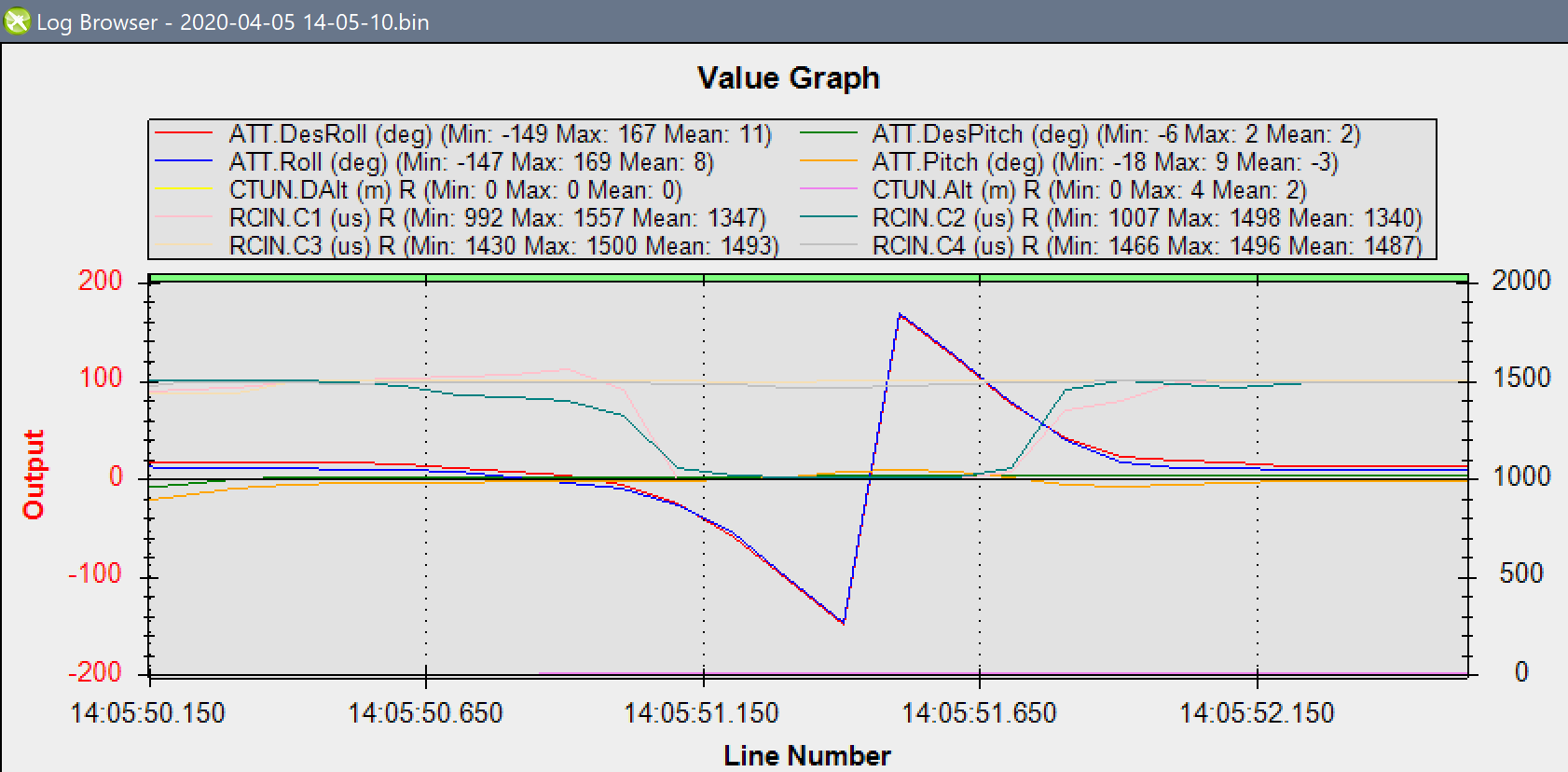
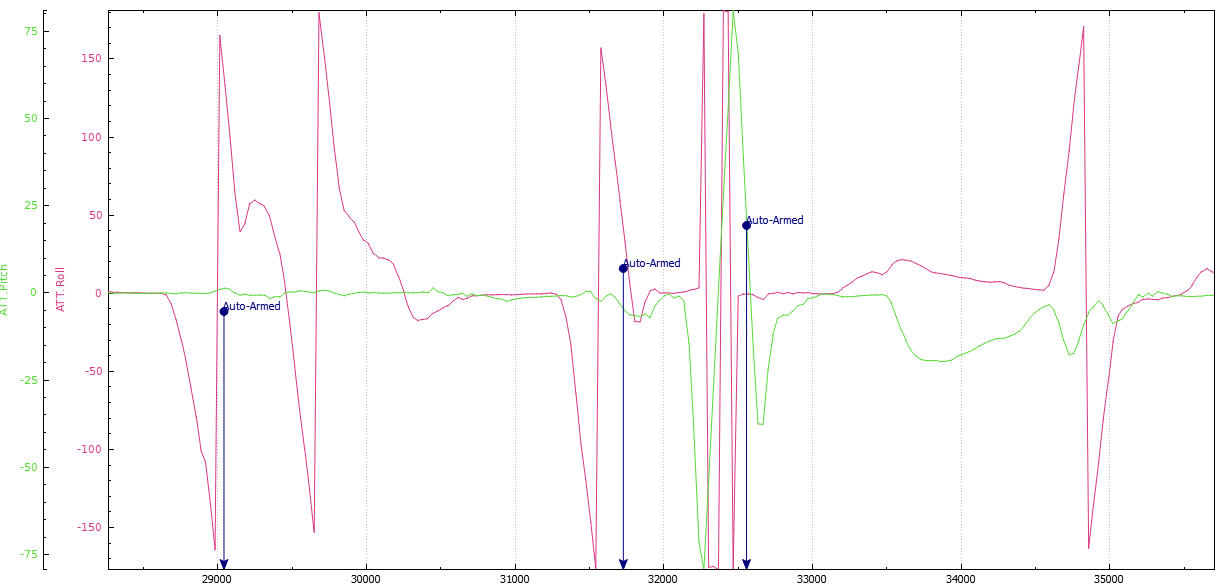
the main thing is that pitch flips look strange to me in the log because roll values seem to flip too. But if one looks at the RCin only 1(throttle) and 3(pitch) were used to pitch flip.
And for roll flips it’s like I would expect. 1(throttle) and 2(roll) sticks were moved and the roll values do what is expected. The pitch values stay close to neutral which is also ok.
I couldn’t reproduce the same by accident.
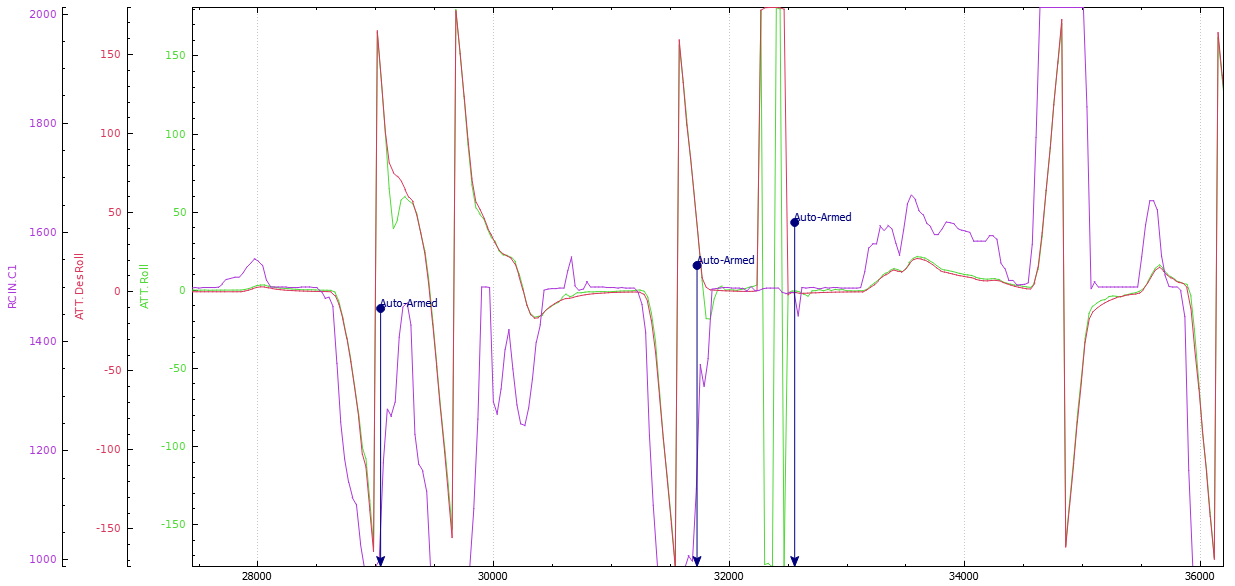
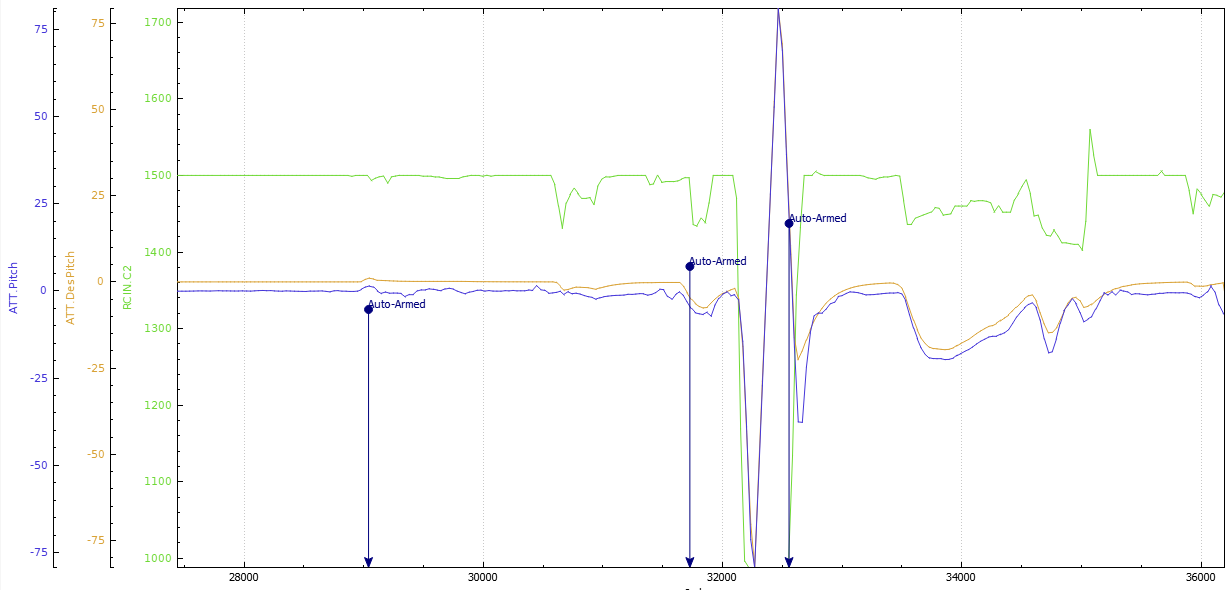
Here’s a couple of pics from a log including some rolls and a double roll combined with a pitch flip.
Quad 450mm in Acro mode, Pixfalcon FC (like a Pixhawk-mini)
At about 32500 it did do two rolls and a flip all in one sequence. It was commanded, you can see the roll input stays “rolled” through that whole sequence.
There’s even some of the rolls that included complete yaws too but I didn’t picture those details.
Summary: I couldn’t find anything in the log that looked uncommanded or unresponsive.
AC 4.0.2
Here’s the whole log, check it out and let me know what you think. I’m more than happy to be corrected on anything I’ve got wrong or misunderstood too.
I thought you could download from that link without signing in to dropbox?? Maybe not…
If it’s requesting sign-in or asking you to create an account I think you can skip it.
EDIT: Let me know if you want the log hosted somewhere else.
so looking at the “double roll combined with a pitch flip” it seems to be some roll moving together with pitch according to the lines drawn in the log.