Could anyone please show me how to connect the frsky r-xsr receiver to the pixracer? Thanks.
Sbus out of XSR to Rcin of Pixracer the same as any Pixhawk variant.
The pixracer has a FrSky input that accommodates for FrSky receivers.
Any chance any one has a clear photo to show me. Thanks.
Not so. It has a standard RCin input like any other Pixhawk variant. If you are talking about Frsky telemetry output from the PixRacer that’s something different. If that’s what you are referring to you simply connect the Rx/Tx signals together (short them) and input that to the Sport of the Frsky Rx. You have a PixRacer manual right?
1 Like
No, I don’t have a manual. Could you please explain what the frsky port on the pixracer is for. Thanks for your support. Cheers.
It provides Frsky telemetry to the Sport of an X-series Frsky receiver w/o the need for a TTL-RS232 converter that is required with a standard Pixhawk. Configured properly in Mission Planner it will give you Mavlink telemetry data on your Frsky transmitter. Info here:
http://ardupilot.org/copter/docs/common-frsky-telemetry.html
Google “Pixracer manual” you will find one.
1 Like
Ok. Thanks for your explanation. I’ve attached an image. Any chance you could draw lines indicating how to connect the receiver to the pixracer. Cheers.
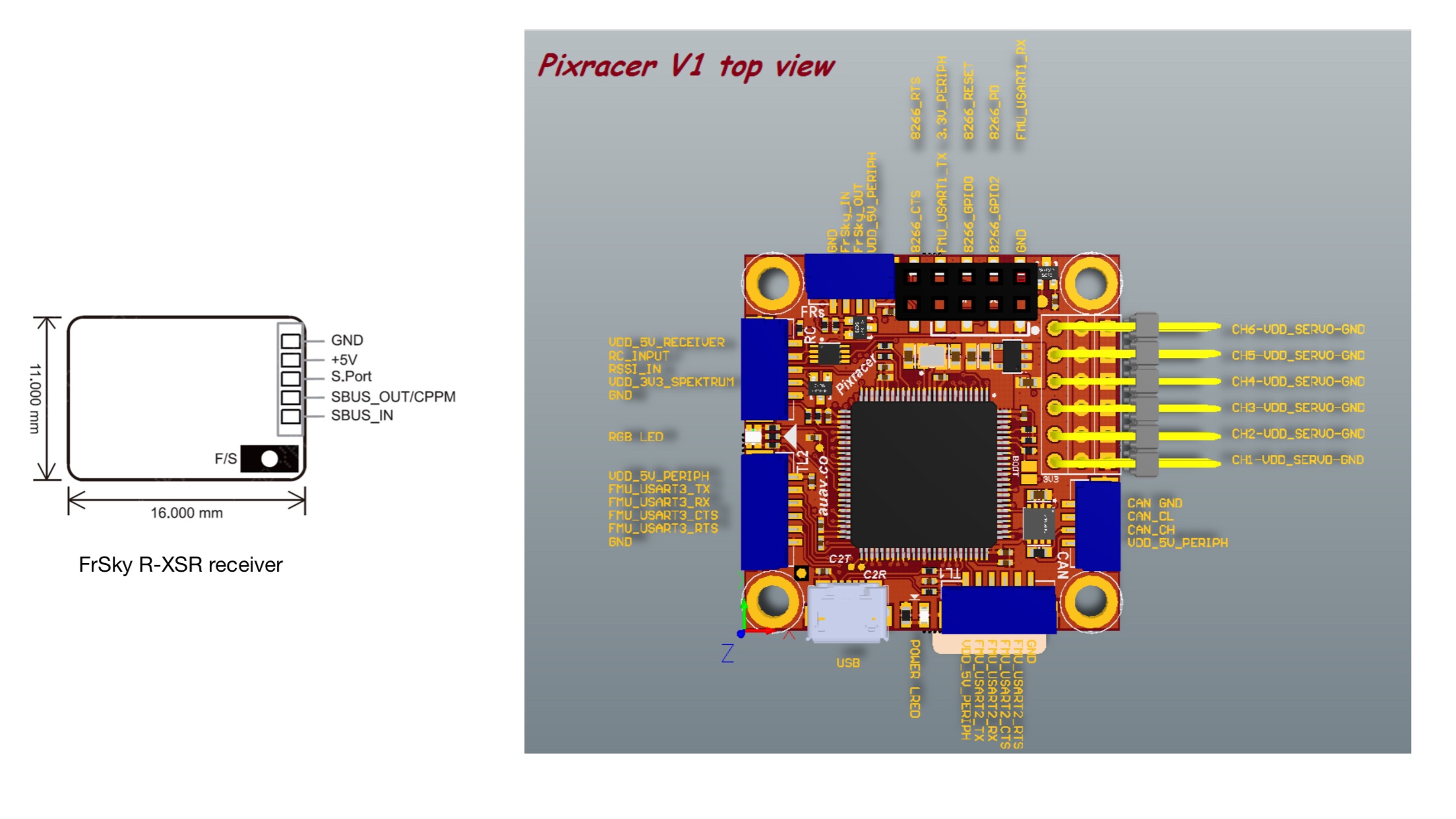
Here you go.Put the reciever in S-Bus mode.
R-XSR-PixRacer.pdf (612.4 KB)
3 Likes
Thanks you very much. Also, do I have to connect the +5V pin from the receiver to the vdd_5V_receiver pin on the pixracer in order to power the receiver? Cheers
Yes,sorry I forgot to include that. It’s fixed now in the previous post.
Thanks for your help. It has been very much appreciated.
Your welcome. I happen to like the PixRacer. I have 2 and another one on the way. A couple hints:
To get telemetry working change the SERIAL4_BAUD to 57 and SERIAL4_PROTOCOL to 4. And then assuming you are running OpenTx “Discover Sensors” and you can then setup some simple telemetry screens.
ESS8266 WiFi module- Unless you bought your PixRacer from mRobotcs chances are the radio will not work and will need to be flashed with new firmware thru an FTDI adapter. If you need more detail about this let me know.
1 Like
Thanks for the hints. Just clarifying: Do I change the serial values that you mentioned on mission planner? And then I run discover sensors on OpenTX for the taranis to receive telemetry back to the taranis screen?
I purchased my pixracer from banggood but I am yet to test the wifi board. Hopefully it works! If it doesn’t, I’ll let you know and maybe you can show me how to update the firmware?
I really appreciate your help.
Yes, right. The Frsky telemetry port is serial 4. The WiFi radio almost certainly won’t work. If the SSID is not Pixracer chances are it won’t work. Its not difficult to flash the correct firmware.
Sorry, what is SSID?
Service Set Identifier or the name associated with the wireless network.It’s what’s shown when you search for wireless networks from your device. The only firmware that I’m aware of that actually works with the PIxRacer gives it this name. So if it’s not “Pixracer” it probably won’t work. Banggood and other vendors of the Pixracer clone provide a useless link for the ESP8266 radio. This is where you need to go:
https://pixhawk.org/peripherals/8266
But I would advise using the Nodemcu application to flash the firnware rather than Esptool.
Thank you for your assistance
Hi all,
Just want to ask an addendum to this thread, rather than starting a new one.
Assuming one has already connected the R-XSR receiver to the PixRacer’s RCIN port (including ground), is it also necessary to connect the ground pin of the PixRacer’s FRS port to the R-XSR (for telemetry)? Or can one just connect the R-XSR’s S.Port to the PixRacer’s FrSky_IN and FrSky_OUT?
Thanks,
Imf
Hi,
I set it up exactly as it is in the picture in one of the previous posts. I do not think it is necessary to connect two grounds. Only the RC ground should be fine. As you said, you can just connect the R-XSR’s S.Port to the PixRacer’s FrSky_IN and FrSky_OUT and then have the ground in the pixracer’s RC port. Hope this makes sense. Cheers, Andrew.
Hi,
thank you for the information! I want to connect the receiver to a pixhawk. I ried it with the inverter and it does not work. That is why I found this thread.
Can I connect the pixhwak in the sameway as the pixracer, i.e. contecting tx and rx together to the S.port without a diode?
Thx,
Tobias