Bad news, the Pixhawk has no dataflash log. I can only get the tlog from the PC via MP.
Not sure why the unit doesn’t have one.
Not sure if this affects it, but I didn’t have the GPS plugged in? I’m using the Here+ with the RTK base for input.
If it is meant to store a file with Lat/Long and the Depth, no GPS connected it wouldn’t be able to store it?
I went and rewired the whole setup I have from the sounder to the Pixhawk. Installed some new quick connects, etc. I followed the wiring setup as specified in the ArduRover documentation.
Doing it this way I got no data in MP. I switched the TX and RX between the RS232 to TTL Converter and the Pixhawk. I then got data in MP but only when I connected to the unit via Bluetooth to the PC. Stop the Bluetooth and then no data.
So I switched the TX and RX wires from the Unit to the RS232 to TTL Converter and Viola!
So I am unsure if the Converter I got already does the switching internally? But I am getting the data through MP via RS232 and correct values.
I can’t wait to install this into the Boat and get the RTK Logging with the Depth. This saves me about 1-2kg of Weight that I don’t need anymore.
Great job with the NMEA Driver. If you like I can draw up a wiring diagram of my setup so you could add this onto the list of supported depth sonars/sounders?
Thanks, Scott. (P.S. Donation coming to ArduPilot in the coming days for the Software in the Public Interest, Inc.)
I’m not toot familiar with the Lowrance Totalscan but a NMEA 0183 output is certainly a digital signal. In particular it’s a serial protocol (i.e. a string of characters). I think the RS232-to-serial converter used for the ECT400 should work.
If you’re looking to use the Elite 5Ti as well then that probably means that the output from the Lowrance Totalscan needs to be split and sent to both the flight controller and the Elite 5Ti. The diagrams for the ECT400 setup show both the transmit and receive pins are connected but in fact, it should work with just the transmit output (from the Lowrance Totalscan) split and sent to both the flight controller and the Elite 5Ti.
The thing to be careful of is the voltage of the pins connected to the flight controller’s telemetry (aka serial) port. The flight controller can only handle voltages up to 5V so if you check the voltage across the ground and transmit or receive pins and find it’s over 5v then that’s dangerous to connect.
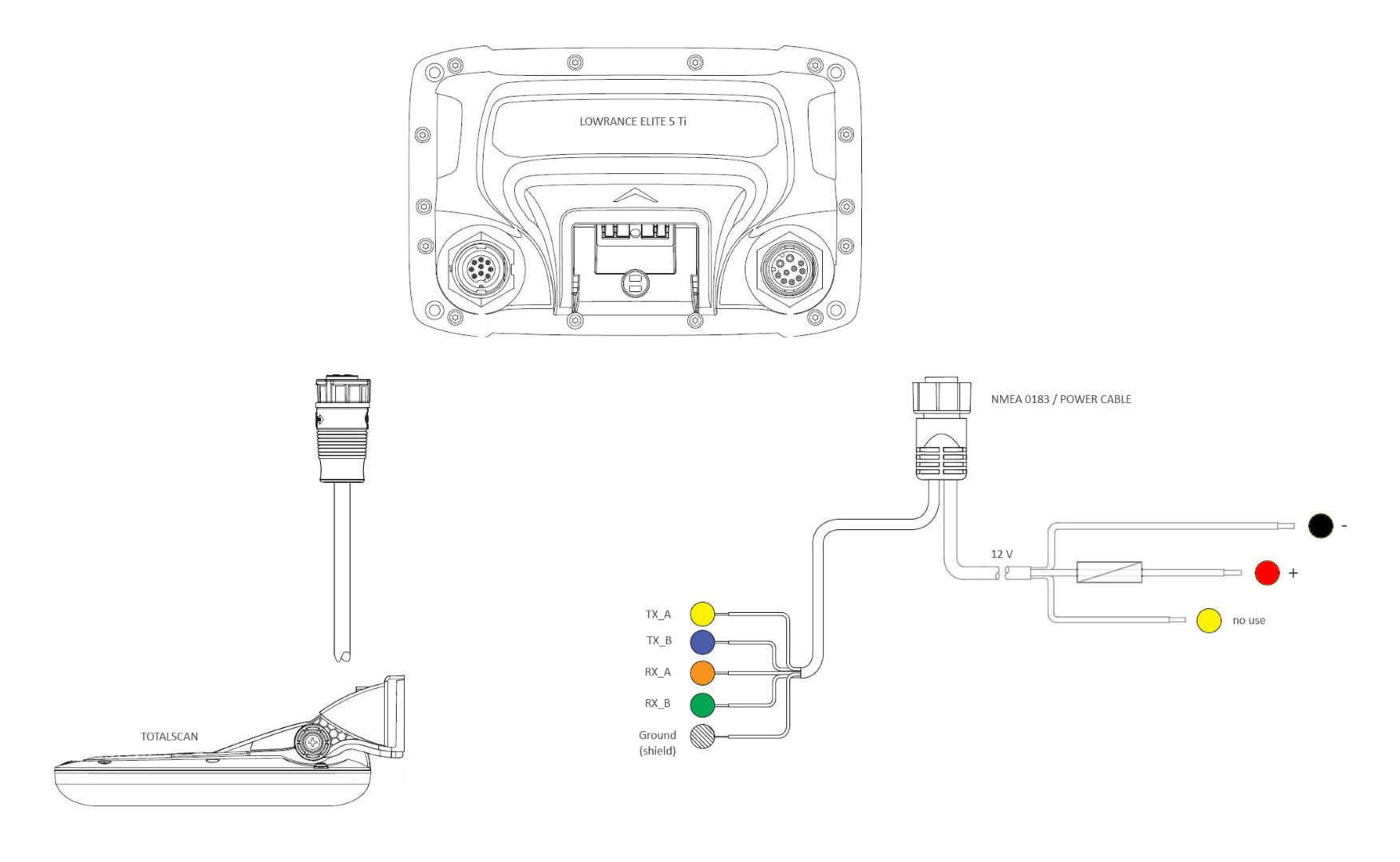
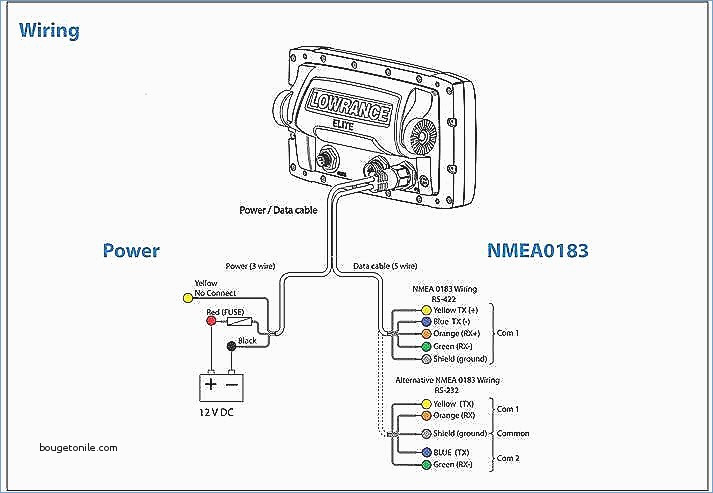
Totalscan connected to Elite 5Ti with the standar cable
Nmea/power cable output from Elite 5Ti to RS232-to-TTL converter.
RS232-to-TTL converter to TELEM2 Pixhawk
As you can see on picture, from nmea cable I have 5 cables (TX_A, TX_B, RX_A, RX_B and ground) It seems a RS422 output not RS232. But there’s an alternative wiring for RS232.
No need in converters just add a resitor.
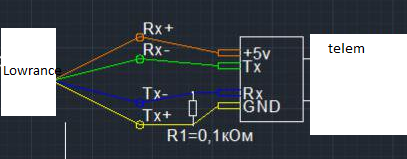
Yellow (TX+) from ELITE to telem ground
Orange (RX+) from ELITE to telemetry +5v
Blue(Tx-) from ELITE to telemetry rx
Green(Rx-) from Elite to telemetry tx
And you need to join Blue(Tx-) from ELITE and Yellow (TX+) by 100 Om resistor.
Hi Andrei,
Thanks for your comments.
I’ve tried your scheme but it doesn’t work for me. No sonarrange or sonarvoltage data.
Maybe any detail I’ve missed?
Thanks
Thanks for your comments.
I’ve tried all this and other situations but no success.
I will inform if I finally reach anything.
It colud be nice to connect a commercial fishing sonar to pixhawk for most people.
I would like to know if there is any way to output these NMEA sentences given to Pixhawk 2 by Emlid Reach M+ to a Ground Penetrating Radar (GPR) which has a RS232 connector?
If so, would you be kind enough to detail how it can be done? (which port can i configure and what parameters/commands will i have to use/change?)
I follow this setup with echologger EU400 (with FTDI USB connector). I have bad LIDAR health in MP. And there is no sonarrange data. I already setup NMEA output to DPT. I try to switch Rx/Tx from echologger to pixhawk but no success.
Do i need USB to TTL converter? how to remove bad LIDAR health?
MP version 1.3.68, Ardurover V3.5.1
I’m not sure if it’s possible to simply connect an EU400 to a flight controller using an FTDI cable (i.e. USB to serial). I’m afraid I’ve only used the ECT400 which comes with an RS232 interface.
If it were me I would probably try using serial passthrough to see if I can connect to the sonar through the flight controller.
Good afternoon Mackay9. I al using a DT800 airmar echosounder. The problem i find is that depth is read in meters from nmea sentence. If you were able to read the field in wich depth comes in inches the accuracy would be 3 cm. Now , as you read the field os “meters”, It vives me depth each 0,10 m. Ej. 1 m, 1.10m,1.20m and so. I know is a problem with the nmea informatión from echosounder. Any sugestión would be appreciated
Hi Randy,
When using 4800 baud, is the setting SERIAL2_BAUD = 4, or use the full 4800 value?
EDIT - I didn’t have Full Parameter List Description in Mission Planner, now I do so I can see what must be used.
For those who have the same problem as me - CTRL + F and Select Param Gen from the table and WAIT - it takes some time. Then go to Basic Param then back to Full Param List and it will appear.