Hi Randy,
When using 4800 baud, is the setting SERIAL2_BAUD = 4, or use the full 4800 value?
EDIT - I didn’t have Full Parameter List Description in Mission Planner, now I do so I can see what must be used.
For those who have the same problem as me - CTRL + F and Select Param Gen from the table and WAIT - it takes some time. Then go to Basic Param then back to Full Param List and it will appear.
We have developed a first USV last year with IFREMER based on a ECT400 and it works great!
We are currently developing a new one for other purposes and wanted to use a S500 from Cerulean Sonar with the ping protocol but this is not functional yet for software purposes on their side.
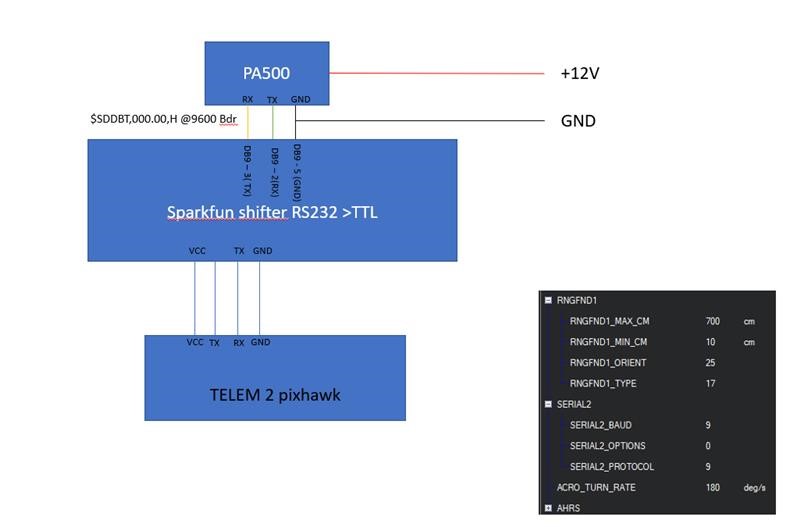
Because we have a mission very soon (end of this week!!) we are urgently trying to switch to a Tritech PA500 we have in stock. It sends a NMEA message like the ECT400 but the talker is only D instead of being GP on the ECT400 => $DDBT,001.5,M for instance and we do not get any sonarrange on MP.
I had a look at the AP_rangefinder_NMEA library and even though I am not very good at coding I found in lines 124/125 of the .cpp code that the library seems to be expecting a compulsory ID talker with 2 letters. I thus thought this might the source of our problem because the parsing does not happen correctly.
Can you confirm it and how could we modify the ardupilot library and recompile it so that it can work for our sounder?
I did a mistake, the ID talker is SD and not D so it should work properly. We did exactly the same assembly than with the ECT400 with the same sparkfun RS232 shifter card. We plugged it on telem2 so the SERIAL port is 2 right?
Any idea why it does not work?
The SERIALx_BAUD parameter matches what the sonar outputs? If it were me I might first check that the ECT400 works and then directly swap in the new sonar. It’s hard to guess what the issue could be but looking at the individual messages from the sonar and comparing them to what the ECT400 produces is a good idea (and that’s probably what you’ve been doing already).
Hi @rmackay9, this is our config (wiring and parameters). Unfortunately the ECT400 USV is doing a mission on Europa Island right now so we cannot try with it.
Just some more info, the only difference I see between the ECT400 and the PA500 is that ours sends 000.45m instead of 0.45m for instance.
We put the baud to 9 as it is a 9600 BR sounder.
Its posible that this feature is broken, can you try on Rover 4.1.dev. You can load this by pressing (ctrl + q) on the mission planner load firmware screen.
I have managed to get this working
The Sonarmite will work on both NMEA types.
A TTL serial converter is required - Just connected up GND-GND TX-RX RX-TX on everything
Baud is 4800 and serial2 (TELEM2) port is used for connection to Pixhawk.
How did you manage to get it work? Which conveter did you use?
I have a rs422 to ttl conveter:
I connected:
from the lowrance to the conveter:
yellow to rx+ from the module
blue to rx - from the conveter
orange to tx + from the conveter
Green to tx- from the conveter
but I get no data. I set the baud in the pixhawk to 4800 and all other settings that are necessary for pix but seems not to work.
Which module did you use?
How did you connect?
I cant help with the Lowrance.
I managed to get my Sonarmite working using a ttl converter. I ensured that all the TX connected to RX.
I would do the following.
Confirm the Baudrate - use a terminal program and if the settings are correct and the data TXRX is correct you should see the ASCII nmea data strings.
Use a USB to Serial connector.
Connect the telem2 to the TTL converter again Rx to Tx.
I had to use a NULL MODEM DSUB male to male so I could plug in the 9pin plug from sonar to the TTL.
my TTL converter has a TX RX light and if everything is connected correctly one of the lights flash(cant remember which)
In MPlanner you need to set Serial2 to the correct baud, and set the other settings as per details in the thread above. make sure the Rngfnd is setup and also that the frame class is a boat.
hi scott,
can you help me given an explanation on your experiment, I use USV with GPS RTK Navcom position and depth with gpsmap 585 fishfinder, so what I need is the NMEA output format of the existing equipment sent telemetry by pixhawk to PC,
thank you.
I’m a beginner
They work fine. Just set it up using the android app first. And configure according to instructions in the ardupilot wiki. I understand that they MUST have minimum 4.9 V to operate, so I fed mine the plus wire from a separate BEC out of concern that my pixhawk might fail to keep the minimum voltage.
Olá ele ainda esta disponivel para venda ? tentei contato com o suporte para tirar algumas duvidas, até mesmo fiz o pedido de compra mas não consegui contato. estamos tentando adiquirir ele para um projeto aereo.
Hi, i cannot get any data from sonar range have you some suggestion ? from android app i can see something only from echogram but no range model used 2d-base , tried different settings /baud / ardu versions thanks