GPS/GPS2 is just a label, they are actually serial ports (except in ph2.1, I think the gps1 port also has i2c2 connections so it is a different connector and pinout), same as serial1/2. That means you can just plug the gpses and other serial peripherals wherever you want and just change it in the parameters what each one is used for.
As for “chaining” serial data (tho it is not really chaining, more like connecting in parallel), it is possible but it can create issues if 2 devices are sending over the same line, so if you are going to do it, just connect the rx pin to just one tx pin (of the device that needs to send data back to the pixhawk) and you can connect the tx pin (from the pixhawk) to how ever many devices you want.(All of that can add noise to the line, even if nothing is being sent, so if you have data integrity issues later on that can be a cause)
Eg. if you have an osd and radio module, you connect the rxRadio, rxOSD and txPixhawk together and txRadio and rxPixhawk together. Power the devices and that is it. (That is how I have mine set up)
PS Your lidar supports i2c i think, you don’t have to use serial ports, that would free up a port for you.
PS2 take care of the power draw from the pixhawk ports, they can only deliver a small amount of current to the devices(200mA I think), so if you connect a lot of devices, power them externally with a common ground
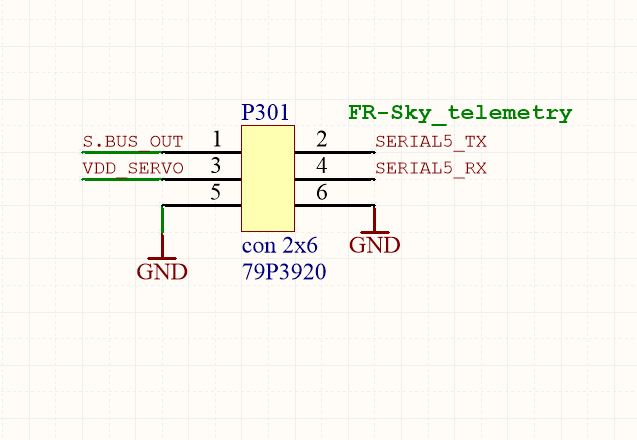
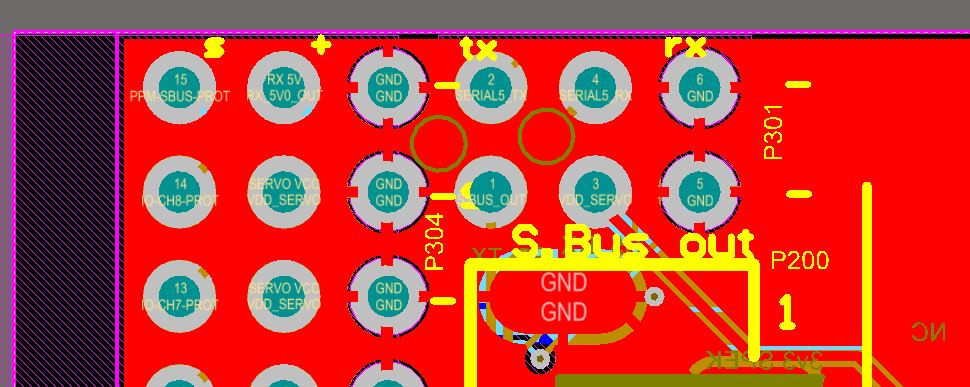
The connector marked CONS on the Carrier Board is Serial 5 which is now available for general serial configuration in the latest Rev of Arducopter. Use that port for your Lidar.
Is there documentation on which pin is which for CONS? I think I need 4 wires – power, tx, rx, ground – to make the serial interface of the SF11/C work.