I have just finished a pixhawk quad build but when i try to takeoff it is very unstable and yaws clockwise.
my build specs are
Frame F450
motor E-Max 2213 935kv
props 1045
transmitter Fly-Sky Fs-i6x
esc blheli_s 35 amps one-shot 125
battery 3s lipo 3300 mah
this is my .BIN file can any one please help me. 00000001.BIN (1014.4 KB)
i have calibrated the esc and motors many time i have tried adjusting the cog (center of gravity)
i have tried trimming on the transmitter and re uploading the mission planner software and nothing has worked so far.
According to your log, there is something I can point out:
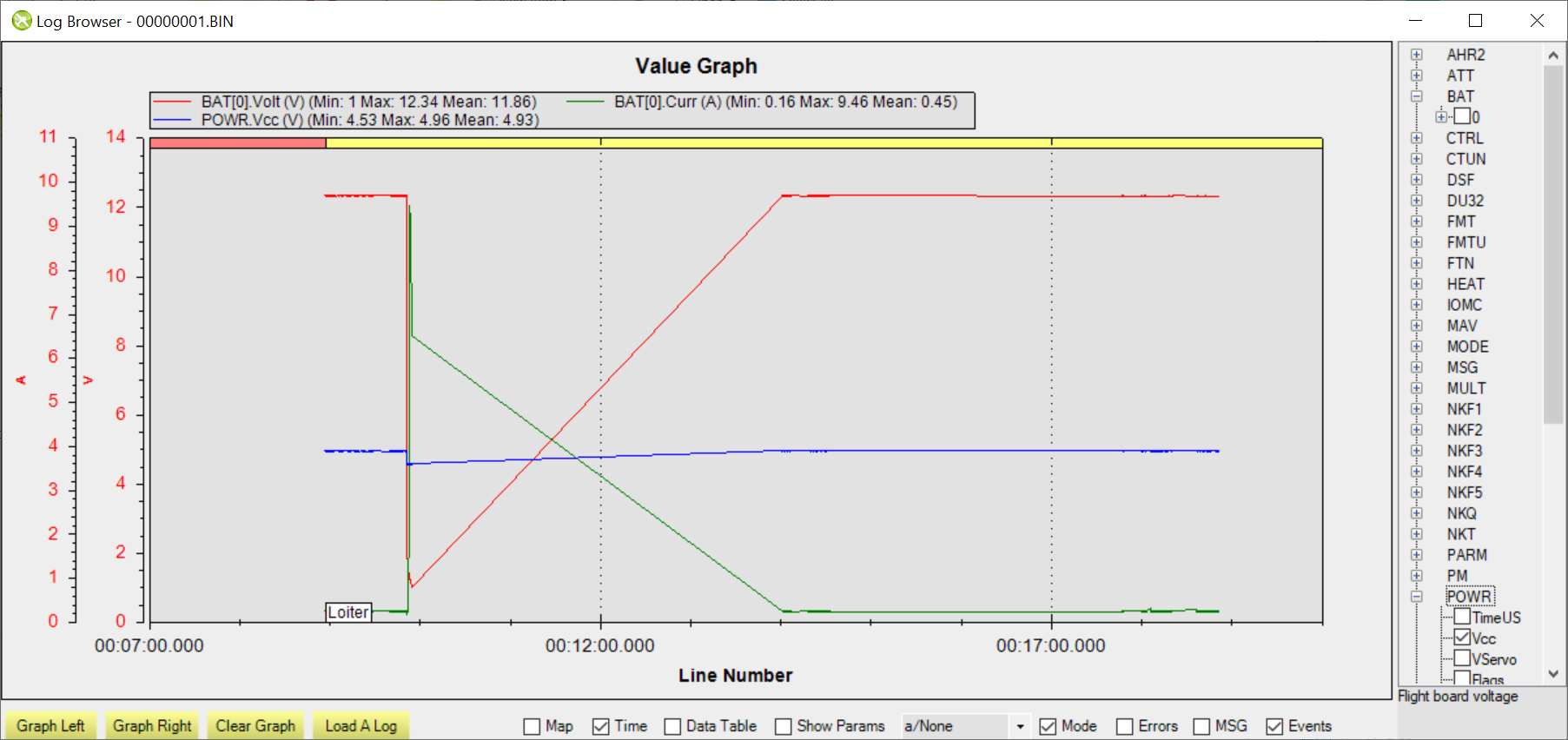
The battery, power supply system seems to be odd. As you can see at the photo below: Voltage dropped so hard and current got very high, right after this moment, the voltage supply for IMU/FMU - your autopilot was dropped to 4.5V - this is not good because 4.5V is not simply enough. Whichever autopilots you use, I suggest it should be 5V - 5.2V. Battery voltage dropped is inevitable but it dropped to 2V is not acceptable.
Please check the battery to make sure you have your power supply is “healthy” enough
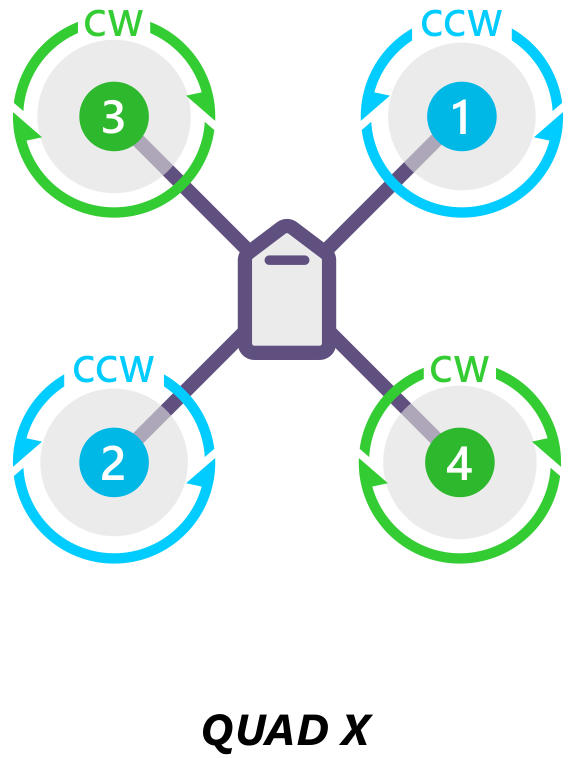
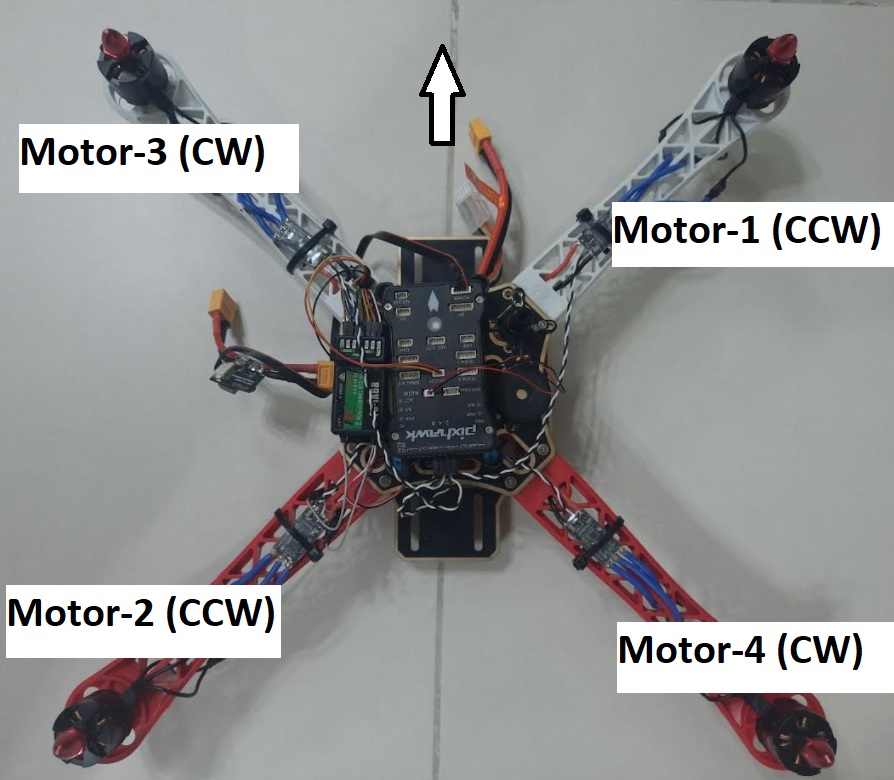
About the propellers and motor rotating direction, please make sure you are right at this point. I assume you are using Quad X and motor direction should be configued as follow. A photo of the drone from you may help a lot.
Thank you for the response.
I will have a look at the battery and even when i start in stabilise mode it still is uncontrollable.
i have checked the motor direction many times and nothing seems to be wrong.
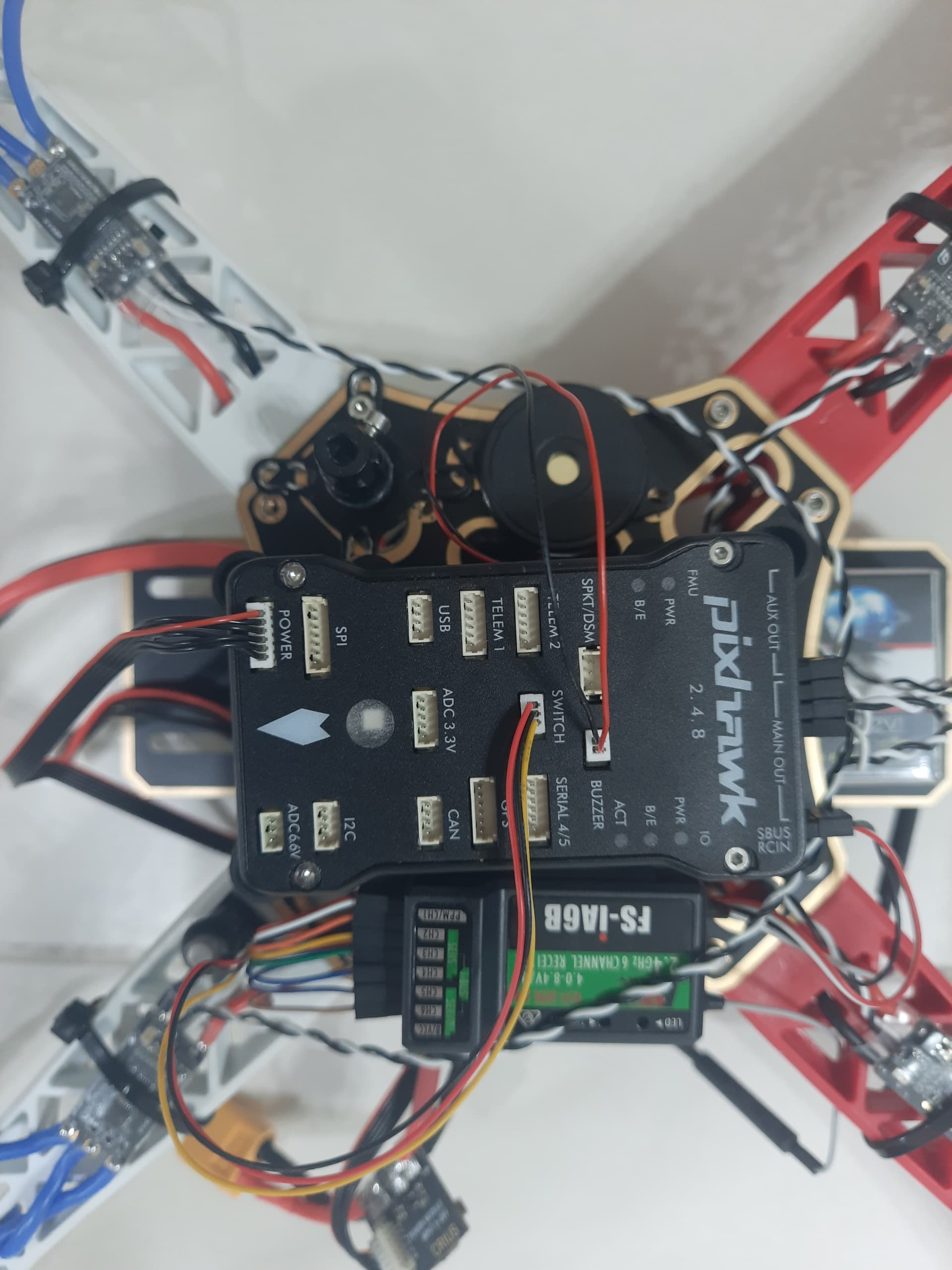
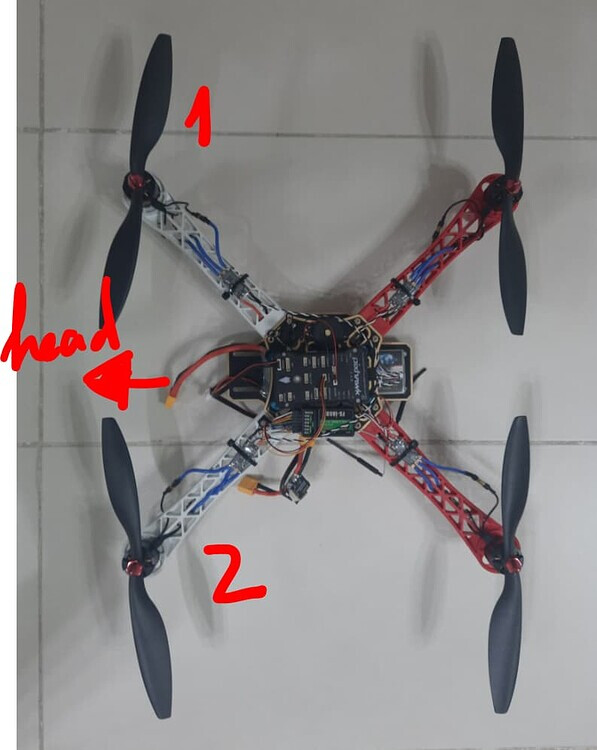
i have added the pictures below.
@bigboy061293
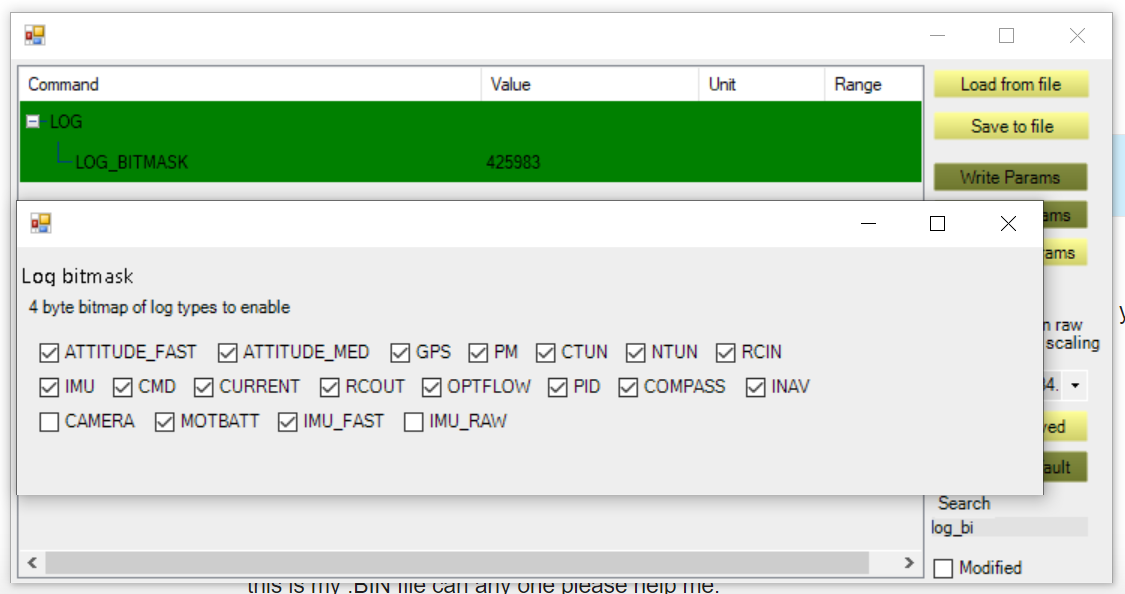
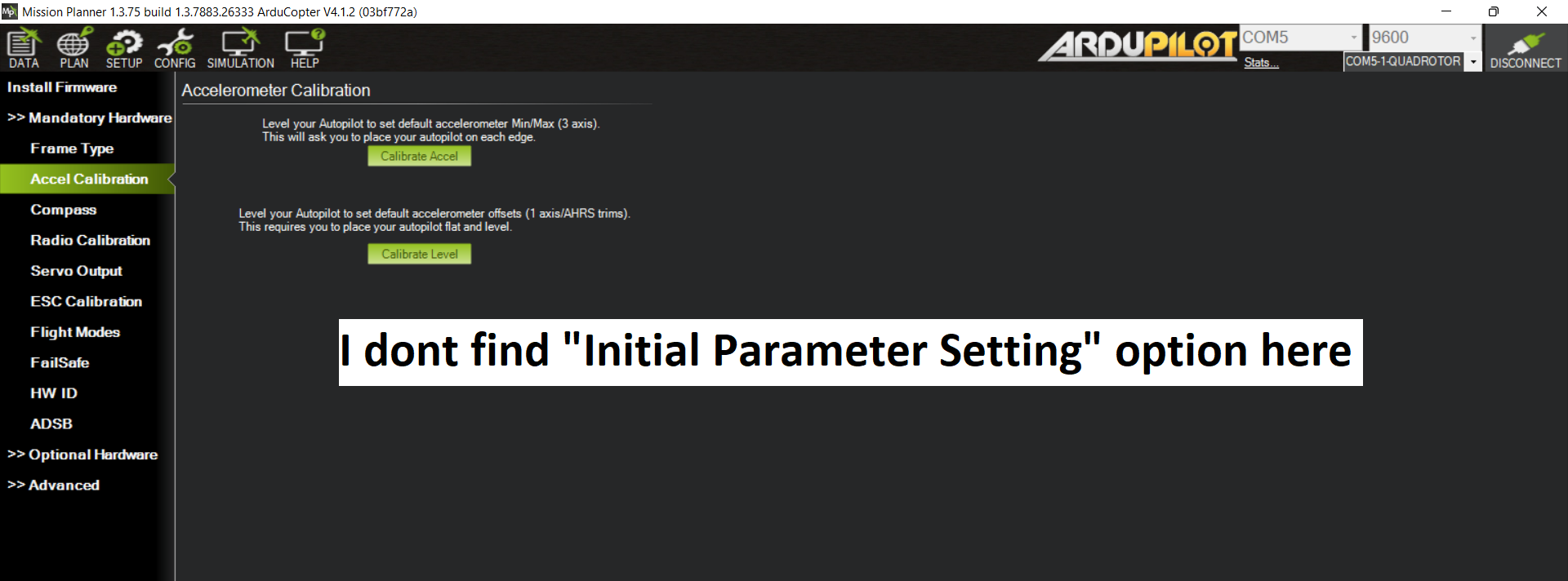
I have an extra question.I am very new to the drone hobby and i do not know how to access the LOG_BITMASK. I am using mission planner 4.1.2.
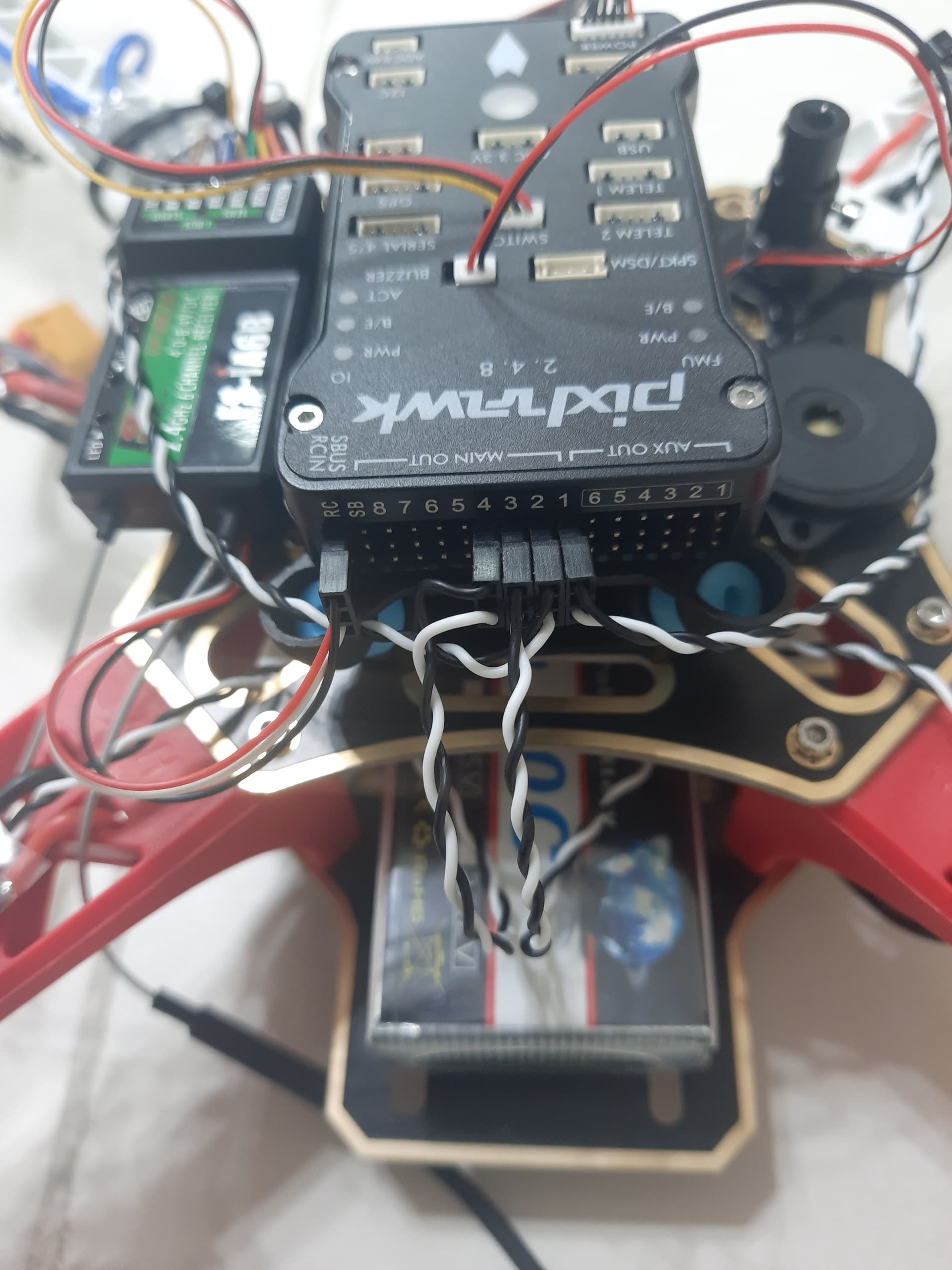
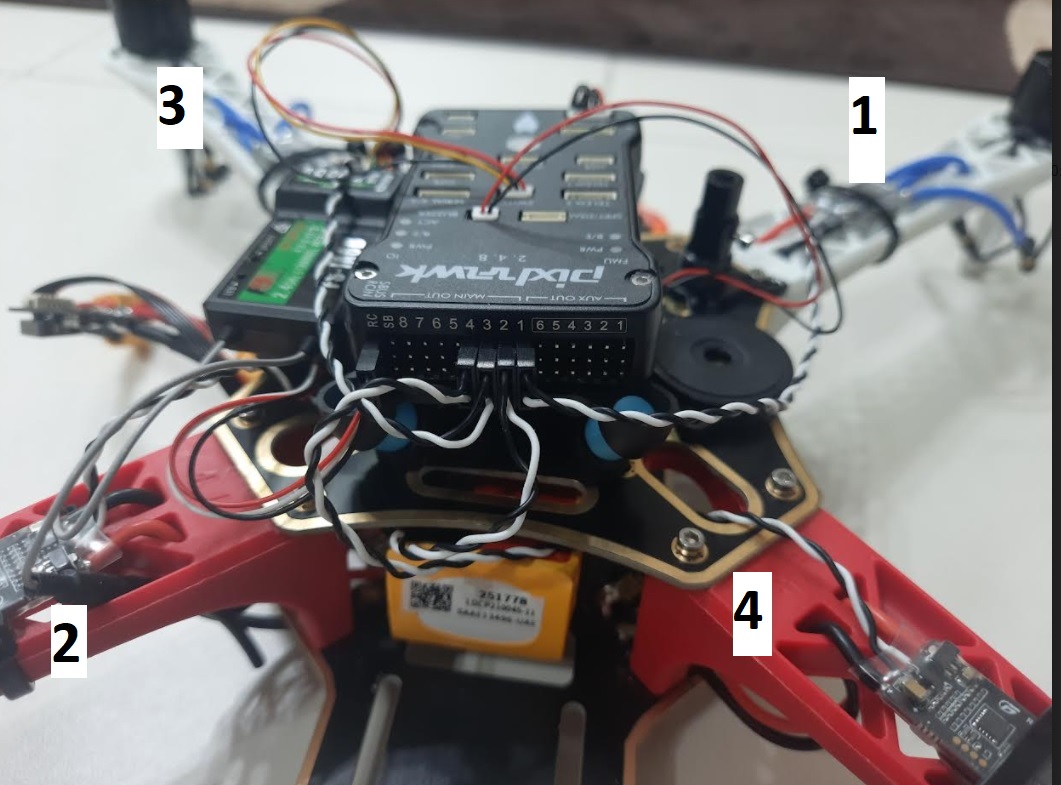
The motor ESC connecting to your autopilot is not clear to me. However I assume you are setting this motor order and heading of the drone like photo below?
Where is your heading of the drone, is it between 2 white arms? If so, you are mounting propellers wrongly so the rotating of the motors are also wrong. Please have some time to make sure where is your motor 1, 2, 3 and 4. Motor 1 and 2: CCW; Motor 3 and 4: CW.
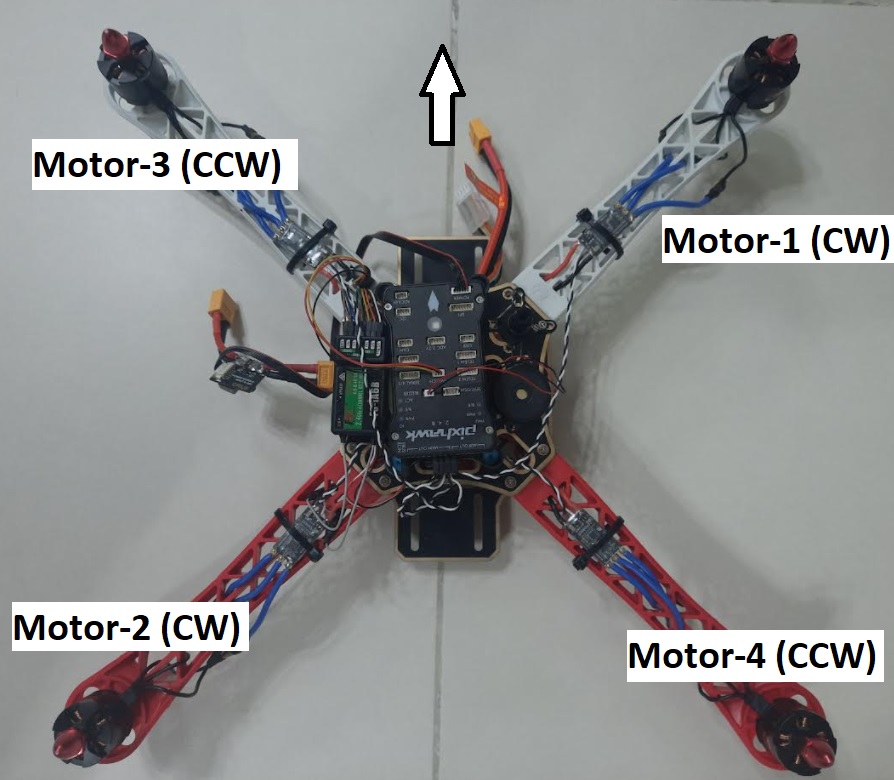
This photo seems to be the right propellers mounting, you just need to change/check the motor orders
That’s what many say and it’s usually still the problem.Either because they didn’t run Motor Test in Mission Planner or didn’t understand how the test is run.
Hi Vu,
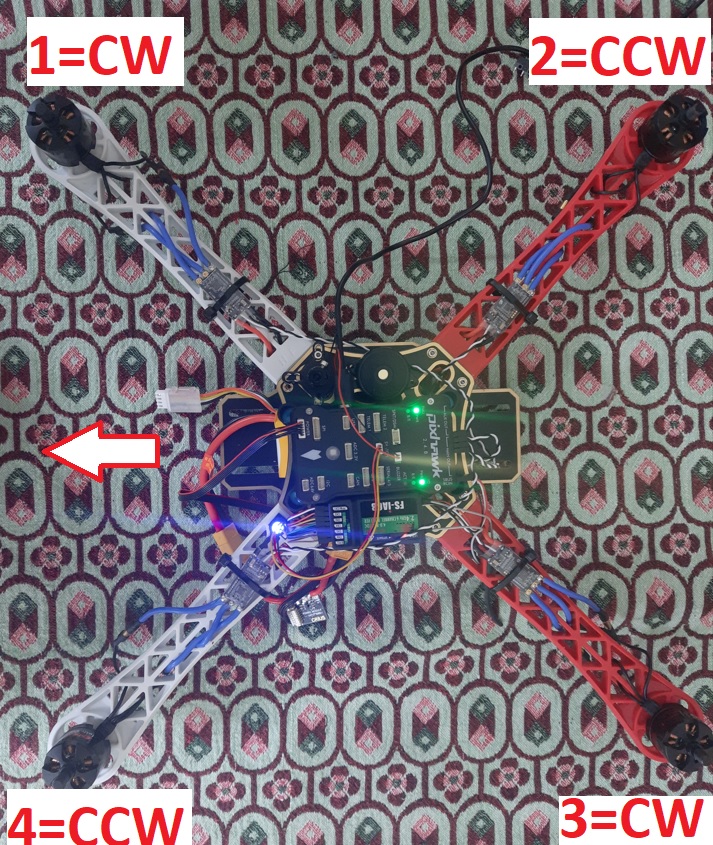
Sorry, in the picture I have numbered the motors in the order they spin during Motor Test.
The connection of Motors to the Pixhawk is exactly in the same order you have mentioned.
I have sent the correct order below.
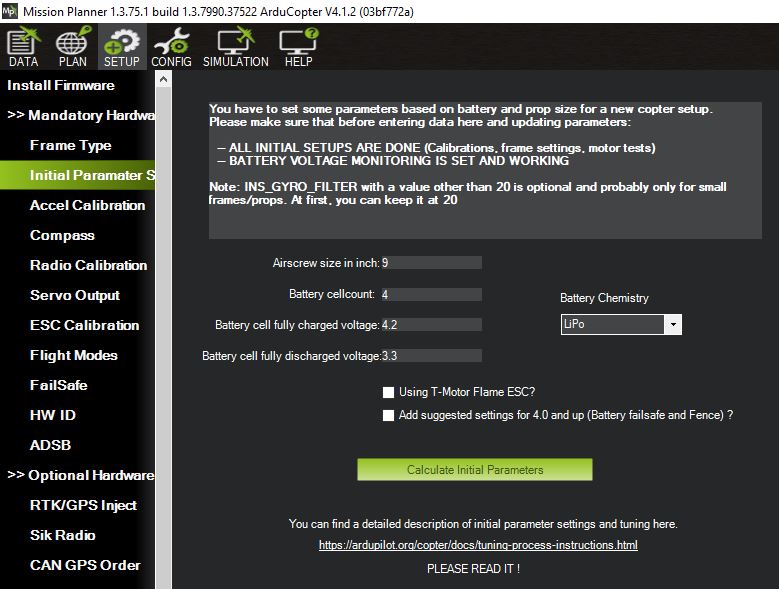
Probably not. Did you set the Initial Tuning parameters? Read this and use the Initial Parameter Setup Page in Mission Planner. Setup>Mandatory Hardware>Initial Parameter Setup.