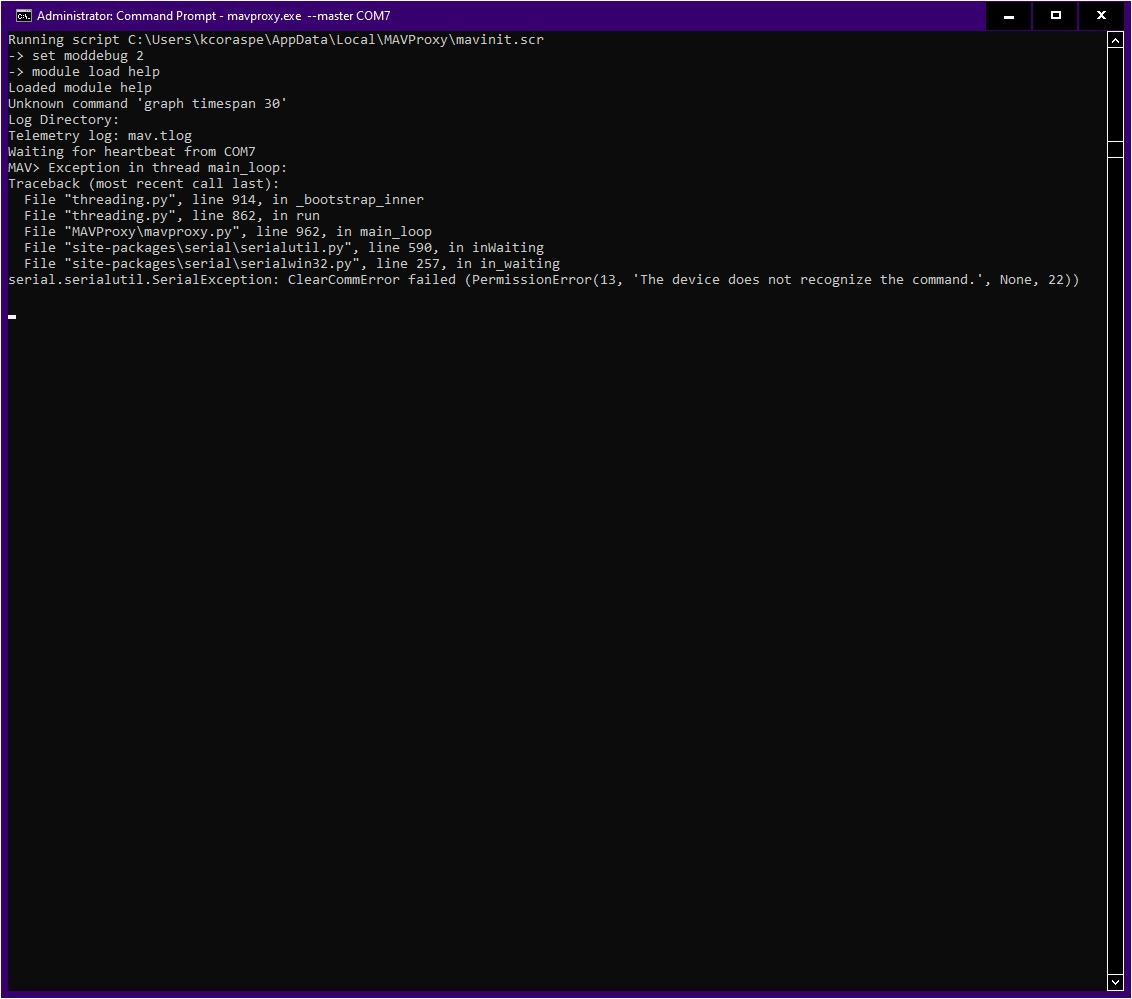
I get the following messages when trying to start Mavproxy after plugging in the USB.
Thank you
You have to wait until you hear the windows tone. So when you plug in you will get one tone at plugin and then another when the FC is booting (right after the FC boot song). start mavproxy then.
So most of the messages are (other than the SRXL2:decoding 00) :
IST8310 found on bus 1 id 658953 address 0x0E
APM: Barometer 1 calibration complete
Init Gyro
APM: Initialising ArduPilot
APM: ArduCopter V4.0.4-dev (ceb0a9c8)
APM: ChibiOS: 331fe75d
APM: Pixhawk1 00280042 32375114 38343932
APM: RCOut: PWM:1-12
APM: Frame: QUAD
APM: GPS 1: detected as u-blox at 115200 baud
I’m not sure if I’m capturing the earliest messages
None of those are really relevant. Here is a new build with handshake built into the autodetect. Let’s see:
I noticed the boot up takes a little longer but unfortunately the Mavproxy output appears the same.
Apparently the TX needs to be off for the handshake to be initiated. Is it?
So power off, switch off TX, power on, switch on TX after a few seconds
No. I only had it off during the firmware update. Let me try it
So I turn everything off. Then power up the Pixhawk and start Mavproxy while the FC boot song and I get the following:
-> set moddebug 2
-> module load help
Loaded module help
Unknown command ‘graph timespan 30’
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from COM7
ISMAV> TAPM: Barometer 1 calibration complete 0x0E
Init Gyro*APM: Initialising ArduPilot
*APM: ArduCopter V4.0.4-dev (ceb0a9c8)
APM: ChibiOS: 331fe75d
APM: Pixhawk1 00280042 32375114 38343932
APM: RCOut: PWM:1-12
APM: Frame: QUAD
Ready to FLY APM: GPS 1: detected as u-blox at 115200 baud
APM: EKF2 IMU0 initial yaw alignment complete
APM: EKF2 IMU1 initial yaw alignment complete
Flight battery 100 percent
APM: EKF2 IMU0 tilt alignment complete
APM: EKF2 IMU1 tilt alignment complete
After I start the TX I start getting these messages:
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
Let me add a little more debug. It’s not clear whether the handshake request needs to come within a 250ms window or not.
Here is the output:
-> set moddebug 2
-> module load help
Loaded module help
Unknown command ‘graph timespan 30’
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from COM7
MAV> APM: Barometer 1 calibration complete
APM: Initialising ArduPilot
Init Gyro***APM: ArduCopter V4.0.4-dev (ceb0a9c8)
APM: ChibiOS: 331fe75d
APM: Pixhawk1 00280042 32375114 38343932
APM: RCOut: PWM:1-12
APM: Frame: QUAD
*
Ready to FLY APM: GPS 1: detected as u-blox at 115200 baud
APM: EKF2 IMU0 initial yaw alignment complete
APM: EKF2 IMU1 initial yaw alignment complete
APM: EKF2 IMU0 tilt alignment complete
APM: EKF2 IMU1 tilt alignment complete
Flight battery 100 percent
SRXL2:Sending handshake after 10344ms
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:Sending handshake after 12747ms
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
So if it needs a handshake before 250ms is up then that’s likely a problem! I’ll have to get an answer from HH then get back to you.
I did the same while the TX is on and here is the output:
XL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:Sending handshake after 4725ms
SRXL2:decoding 00
SRXL2:decoding 00
SRXL2:decoding 00
Thank you Andy
Oh wait. We are only sending a handshake request when we receive data, but the RX will only respond to a handshake request when no data is being sent. My code needs changing!
OK:
It seems that having the TX off gives a much greater chance of success rather than being required. So for now continue to try booting with TX off and then switch it on.
@trigger let me know when you have had a chance to try this
Andy,
with the last firmware, the FMU B/E LED is flashing and the IO one is solid. It can’t boot and the MAVlink is down
Hmmn was ok when I tested on my Durandal. I suspect this is a case of IO happening during boot (which causes a lockup) can you try rebooting a few times to see if you can get past that? If not I’ll cook up a way round this.
Yes, I tried it many times but doesn’t seem to respond
Thank you
Ok, just at work ATM, will post something a little later