There are 6 channels connected to the RC receiver (AR620) and connector for power and ground. The transmitter is a Spectrum Dx6e.
The issue that I’m experiencing is that when I power up the Pixhawk, it powers up the PPM encoder and the RC receiver but I can’t get any readings in the radio calibration dialog within the Mission Planner software. If I leave the Pixhawk power up and disconnect and re-connect PPM first and then the RC receiver everything works.
I would appreciate any suggestions or comments on how I could troubleshoot this issue.
I am confused. Where and why are you using a PPM encoder?
If you have a your X8R connected to PixHawk “or” AR60 has no S-BUS output to my knowledge The servos “or” ESC (if building a quad) will connect to main out 1, to 4 etc of PixHawk not the X8R receiver. Also, when you connect the servos to the Pixhawk Main out pins, you need a provide +5V to the Main Out or Aux pins just at one place. If you are using ESC and they have a built in BEC then the ESC will provide +5V to the MAINOUT and AUX pins.
if your receiver is bind properly to the radio (green light on X8R), inside Mission planner the calibration should work just fine.
Elaborate your wiring more, where is this PPM encoder came into the picture? draw it on a piece of paper how you have wired everything.
Pixhawk supports DSM, so you do not need a PWM to PPM encoder between the receiver and Pixhawk.
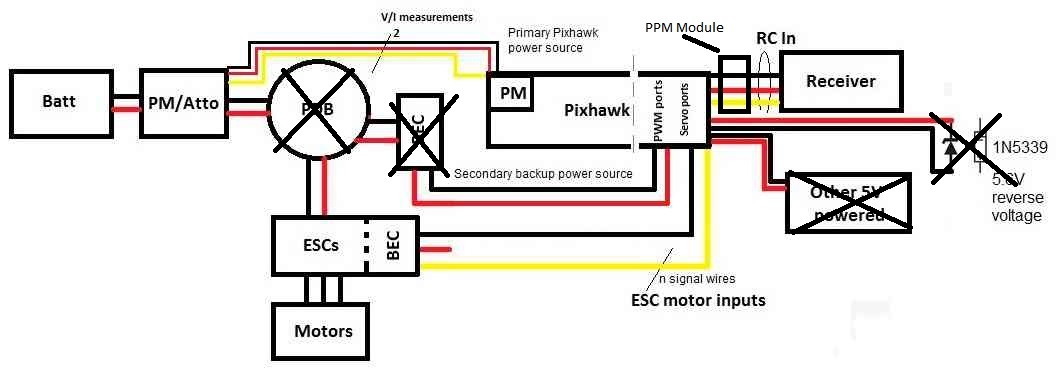
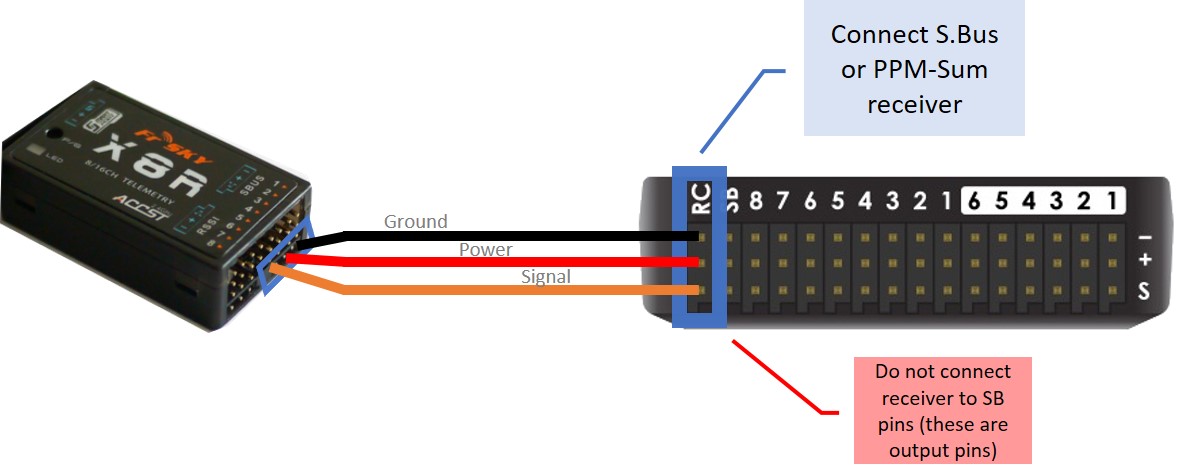
That diagram you used is WRONG. It shows a FrSky X8R receiver with the Pixhawk pins for the RCIN port connected to the signal pins on the X8R. I have 4 of those receivers and they all have a proper SBUS port.
Anyway, post some pictures of EXACTLY what you have and how you have EVERYTHING connected.
My reply was based on him showing X8R RX in the pic later noticing he is using AR60 Rx.
he said “The PPM module is connected to the RC connector in the Pixhawk as follow:” does that makes any sense to you? PPM connected to S-Bus port?
That’s why I am asking him to draw his connectivity diagram. “Which encoder do you have?” the question you asked also irrelevant till we know how he is interconnecting everything. Encoder is an coder, what difference will that make…
What’s wrong with PPM to the RCIN port? We know how he is connecting it because it works or doesn’t based on the power sequence. It works… So it’s irrelevant only when it does’t work?
Thank you for all your responses. Regarding the receiver, I posted the picture to indicate that I was using the correct connection to the RC pins in the back of the Pixhawk. The AR620 receiver has the following pins in the back:
The connection diagram in the documentation just looks bad. Who ever put that up should have used a servo lead instead of digital crayons to show ho to connect that receiver to a Pixhawk, and if the OP used that “diagram” as a guide there is no way on earth he could get a PWM to PPM encoder to work.
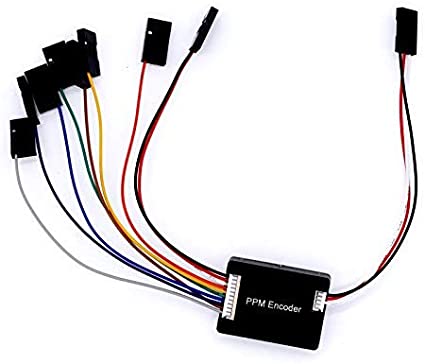
The plugs on the encoder should be numbered, and the cable for channel 1 has 3 wires; White is Signal, Red is power and Black is ground. The remaining cables have a single SIGNAL wire. On your receiver Signal is on the top…
On the output side of the encoder you may have two cables. One of those has 3 wires, White is signal, Red is power, and Black is ground. When you connect it to Pixhawk make sure the BLACK wire is on top, red is in the center, and white is on the bottom…
There isn’t really any confusion. Clearly you have made the right connection because it works. The only question is why it requires the sequence of events you describe to function.
I was going to suggest one of those cheap Orange Rx’s. I used one of those some years ago when I had the terrible Spectrum Dx6i radio. But your solution is better!
Thanks for your response. Are you suggesting that I get the DSMX SRXL2 Remote Receiver and replaced the AR620 altogether? In this way removing the PPM encoder? It needs to be compatible with the DX6e
No, keep the AR620 and try a build of master with my PR to support SRXL2. I can do you a buiomld if you tell me the flight controller it is for. master is alpha quality code, so Caveat Emptor. Andy Kunz from HH has said that the AR620 supports SRXL2 if you upgrade its firmware to the latest (no idea how you do that but HH’s website will probably tell you) - and ArduPilot will support SRXL2 if you use my PR (Pull Request).
Thanks for the info Andy. I found the cable that I would need to upgrade the firmware. It’s the part number (SPMA3065) from spectrum and also found the software to do it here (http://spektrumrc.cachefly.net/apps/spektrum_programmer.html). I may need to create an account on spektrumrc.com in order to download the latest firmware.
Pardon my ignorance but I don’t know what buiomld means. I would appreciate any help in order to get my pixhawk to support SRXL2. I’m using the Pixhawk 2.4.8