I found a couple of issues, which I think I have fixed - but want to make sure I have not broken you. Would you be able to give it another go?
Sure Andy. Thank You.
Andy, everything appears to work properly. I have a couple of issues but I don’t think is related to the firmware. 1) I have a ublox m8n GPS/Compass combo and the compass stopped working 2) for some reason I cannot arm the motors with the controller but I can with MP.
I’ll create another post if I can’t resolve the issues. I have calibrated properly the ESC and the Radio so I’m reading the troubleshooting section for such an issue.
Thank you
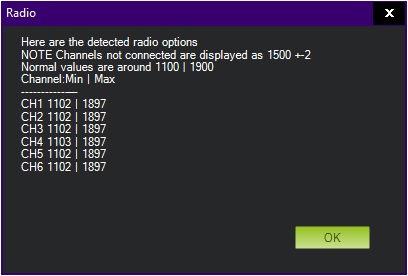
I guess check the channel ranges on your transmitter. I guess it’s possible you can’t arm if yaw is not going high enough or the channels are mixed up. A recalibration may solve this.
But great to know it’s still working. I will try flying with this today to see if I encounter any further issues.
I have done the radio calibration several time and it appears correct. I’ll keep at it.
No joy for me on flying, it’s raining here all day.
Look right. Do you get the cannot arm sound or nothing?
Nothing. Preflight check is all good. RC is in Mode 2 but I tried the other way just in case.
Ok, well it’s still not working properly on my SPM4650 so I will need to think a little more. Seems weird.
It really is. I reverted back to the original firmware and the Compass is detected. It is the Ublox m8n GPS/Compass combo where the compass is connected to the I2C DF13 connector.
Thanks for looking into this.
I think this is my fault. You have a regular Pixhawk1 with the full 2mb flash, but I built for Pixhawk1-1M which will exclude certain drivers (including compasses)
I’ve updated the link with a Pixhawk1 version - let me know if that is better
Andy,
It detect both the GPS and compass. I did a compass calibration using both and I remember that I had to disable the internal one because of wild behavior. This may explains the current behavior. I also did a accel calibration and it passed.
Thank you.
P.S. I’ll let you know more when I can fly it.
Now I’m getting the following error in the message screen:
5/20/2020 2:54:29 PM : PreArm: Internal errors 0x400 l:269 ,cnstring_nan
Somethings generating nan, but I don’t know what that would be. I don’t think this is anything to do with the spektrum support
Please try to understand this is a common problem with the now very popular Spektrum AR620 DSMX 6 channel receiver when trying to “naively” connect it to the Pixhawk SPM/DSM receiver port, because it is inexpensive, it has no “DSM” DF-13 connector port like the other Spektrum DSM primary and satellite DSMX receivers which DO have SPK serialized DSM DF-13 connecter ports to connect direct to the Pixhawk DF-13 SPK/DSM 3-pin port and everyone who has a Spektrum DX6/Dx6e Transmitter is limited to 22m/sec frames. It is a comedy of problems the receiver was not designed for as it is primary an aircraft receiver for aircraft models intended to connect the PWM channels (NOT DSMX) receiver channels “Direct” to a throttle ESC and PWM Servos (Aileron, Elevator, Rudder) with CH5: Gear reserved for Flight Modes 1-3 (Switch B) and CH6 Aux1 for additional Ailerons or Arming/Meow (Switch H, or arm button I). I have the same problem of not seeing any RC signal via the Pixhawk SPK/DSM port and not showing any signal on Radio Calibration Tab in Mission Planner. It also is diagnosed as NO signal (no DSMX compatible signal) when the RCTimer Failsafe (yellow flashing) Pixhawk statu port LED. The FIX is get a real DSMX receiver with a DF-13 port, as a primary to bind a satellite remote secondary also having a REAL DSMX port and DF-13 connector on the remote receiver to connect direct to the Pixhawk SPK/DSM DF-13 connector. This is how I wired my 3DR X8 Octo using a AR6610T primary to bind a satellite remote DSMX serialized receiver, even using 22ms on my DX6e (cheaper) transmitter, it works just fine, and you can see the radio calibration tab signals from the Pixhawk via the USB connector and easily view/calibrate gimbal ranges and even rebind at 22ms binding frame rate of the limited DX6e. Only DX7 and above have the 11ms frame rates so get one (Like the IX12). Stop trying to use the AR620 using a JST 3-wire connector to Pin 1/Throttle/data port on the AR620 and then naively assuming this port outputs real serialized DSMX (CH1-6 is PWM) and can only be configured serialized using a PPM encoder connected to RC-IN (Not the SBUS output), and NOT to the SPK/DSM port on the Pixhawk. For that you need a real DSMX serialized output port on a spectrum receiver which actually provides a DF-13 connector port for connecting DSMX to a SPK/DSM flight controller port. Really a headache trying to reload firmware and use other protocols other than DSMX. Just get a DSMX receiver with a DSMX port and keep the AR620 for PWM connections direct to control surface Servos using PWM/ or use a PPM encoder (the old way to connect serialized PWM) which will not give you the benefit of Spektrum DSMX protocol speeds. Spektrum needs to fix this by putting a DF-13 connector port and DSMX protocol on the AR620.
DF13 has nothing to do with what receivers are supported, it is the physical connector used on the Pixhawk. The Spektrum port does not support SRXL2 because it is connected to the RX pin of the F103 in the IOMCU. The AR620 does support SRXL2 as specified by Andy Kunz from Horizon Hobby and we have got it working. D6 does support 11ms - https://www.spektrumrc.com/Products/Default.aspx?ProdId=SPMR6750. The only reason this support is not currently in master is because I have been unable to get both the AR620 and SPM4650 working at the same time.
Agree the DF-13 is just a connector compatible with the SPK/DSM port on the Pixhawk. The problem with the AR620 receiver is it has no DSMX signal pin that is on a DF-13 connector on the AR620. Because the channels are apparently all PWM without a firmware upgrade or your SRXL2 hack, unless the “data” channel signal is SRXL2 (nothing like this even remotely described in the manual) it easily confuses people trying to connect an AR620 to a Pixhawk. Nothing in the AR620 manual tells you how to connect DSMX protocol to a Pixhawk SPK/DSM port. The lack of a DSMX signal on that port is why the RCTIMER failsafe activates and theire is no signal the Mission Planner can see to calibrate the radio. It is just not compatible…without all the extra work you recommend flashing and updating firmware and code. It is good the 22ms problem was fixed, but that does not help give access to a DSMX port on the AR620 which does not exist. It think it is just easier to tell people to get ANY Spectrum receiver with a DSMX port and typical connected using the DF-13 port on that receiver model, or a satellite receive also using DSMX output on a DF-13 connector. Just trying to describe what the problem is commonly with trying to connect an AR620 pin1/data port to a SPK/DSM pixhawk port. It doesn’t work like the other Spectrum DSMX receivers do with the Pixhawk SPK/DSM receiver port.
My DX6e which I clearly described (it is not a D6) manual says it is limited to 22ms, it also says that when binding. If Pixhawk firmware can’t read 22ms from my Spektrum Receiver bind that is a problem. I heard the TRidge fixed that converting the default to also read and check for 22ms or 11ms. 4.0.3 plane fixed that I hope, but what about arducopter firmware we use for quad drones with Mission Planner and QGroundControl, and not just arduplane used for quadplanes or airplanes using TRidge’s MAVProxy I hope both firmware versions include 22 ms fixes.
Andy,
I was able to test fight today and everything appears to be working. Except I logged this error:
PreArm: Internal errors 0x400 l:269 ,cnstring_nan while trying to armed it.
After a reboot I didn’t experience any other problems and I was able to armed the Quad using the switch option since I cannot armed by holding throttle down and roll right for 5 seconds.
I’m trying to tune it now which will be a challenge because of the setup I’m using. I’ll do more test tomorrow once I can set properly the center of gravity.
Thank you
Ok glad it’s working. I’ll have another go at getting my patch suitable for inclusion.It’s possible I have to make this an explicit option.