Hi All,
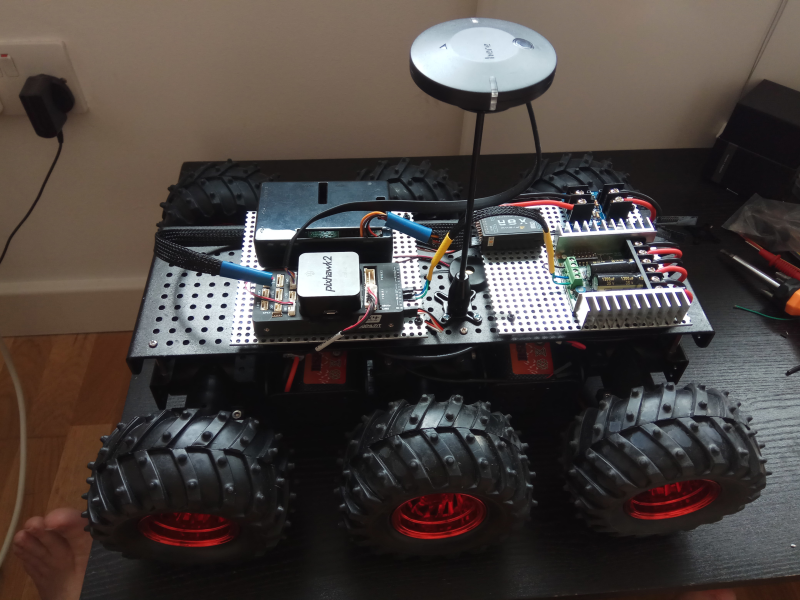
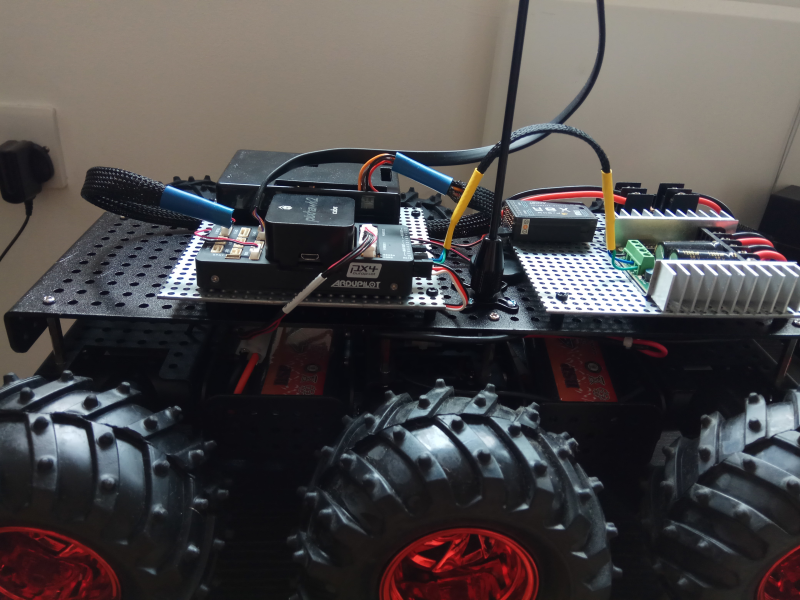
I would like to announce that I have successfully implemented the Pixhawk firmware skid steering function on a 6WD Wild Thumper chassis using a Sabertooth 2X25 motor controller setup as two independent motor controllers, one for each side of the Thumper chassis.
I have attached a couple of pictures of the Thumper and its Pixhawk subchassis.
I raised the GPS/Compass module above the subchassis using a 2.5" high platform to mitigate the effects of the front motors’ electromagnetic field. I got the compass deviation under power to go from an offset of ~40 deg to ~2 - 3 deg using the raised platform.
Very nice Thumper.I have a wild thumper on it’s way,hopefully by next week.I will be incorporating thr
Dimension engineering 2X25. I just have one question,Why skid steering instead of differential steering?
Also,what is the material for the raised platform?
@servoman1,
The material for the raised platform is a pvc type of ABS plastic about 1/8" thick.
Skid steering and differential steering are essentially similar. The rover can turn in its own diameter.
Tanks use skid steering because during a turn the side turning into the turn is moving while the side on the inside of the turn is stationary and therefore skids through the turn as the tank pivots on the stationary track.
Since the Thumper steering is really differential due to the 6 independent motors, the side on the inside of the turn will slow down and even reverse, but not skid, for a faster turn.
Regards,
TCIII ArduRover2 Developer
I like your build. Nice and clean. The one thing I envy about the 6wd is the amount of real estate on top. Looks like you’ve got almost twice what I’ve got with the 4wd.
Cheers
Colin
@ColinC,
Thanks for the kudos, much appreciated. I built two of the 6WD Wild Thumpers for a couple of clients and they were happy with them.
Regards,
TCIII AVD
I am a real newbie with this. This is what I understand so far.
The 3S Lipo (~11.4 volts) will feed power to the Pixhawk through the 3DR Power Module. The 3DR Power Module will also provide enough amps at 5.3 volts to power a GPS, PMM Encoder board, telemetry radio and maybe another small device ( eg sonar).
Here is where I get stumped. The Output XT-60 from the 3DRPower Module feeds power to the Motor Controller at 11.4 volts. I am going to use the T’Rex Motor Controller from Dagu.
But the 6 motors on the Thumper are rated at only 6 volts ( 7.5 volts max ). They will get burned up at 11.4 v.
Where do I get the 7.5 volts to drive the 6 motors?? OR, do I have to stick to only 2S Lipos??
What am I missing?
Cheers
@jwcalvert,
I made a typo when I said that I used a 3S LiPo.
I should have said that it was a 2S LiPo.
Both Thumpers are powered by 4000mahr 2S LiPos.
Regards,
TCIII AVD
This is my first post. I am currently in the process of “leading” a group of twenty five college student in the construction of APM:Rover platforms, (and of course, I have never do it my self)
I have read the vast majority of the APM:Rover manual. Reading and comprehension may be to different things. The following is the list of components we will be integrating to build the base Skid Steer Platform:
Wild Thumper 6X Platform
PixHawk autopilot loaded with 2.4.7 version of APMRover firmware
RoboClaw 2X30 Motor Controller
Turnigy 9X Transmitter using the stock 9X8Cv2 Receiver connected to the PixHawk with the 3DR PPM Encoder
3DR Telemetry Kit
There will be a total of seven platforms built for the class. Five student teams, one Faculty/GTA platform, and my personal platform.
I am trying to avoid the Gotchas associated with the above configuration. Any advise is welcome. If there is a better location for this post, please tell me and I will move it.
I am currently having difficulty understanding to proper setting for establishing the 6 Mode switching capabilities for a AMP:Rover platform. I have found a number of sets of Turnigy 9X setup instructions on the DIYDrone community pages.
@bhuff,
Have you reviewed these instructions in the Wiki: http://rover.ardupilot.com/wiki/common-six-modes/?
I would start out with just three modes which are easy to program: Manual, Learning, and Auto.
I am not familiar with your brand of transmitter so I cannot help with programming it.
You need to program a three position switch (flaps) on the transmitter that can be programmed with three distinct PMW outputs that correspond with the PWM ranges for Manual, Learning, and Auto.
You will also need to program a two position toggle switch (gear) to set each waypoint in the Learning Mode.
Regards,
TCIII AVD
I was hoping you would reply. From previous posts, it would appear that you have integrated the Pixhawk in the Wild Thumper 6WD platform. Would be very interested in recommendations on parameter settings that from your experience work well on this platform.
I will look into just setting three modes on the one Flight Mode switch. I will have to seek out the assistance of one of the students that knows his way around RC equipment.
@bhuff,
Unfortunately the two 6WD Thumpers I built were for some customers of mine and I no longer have the parameter files.
I use Spektrum R/C equipment due to its reliability and could have easily helped you if you were using Spektrum equipment.
Regards,
TCIII AVD
I am compeletly new to this and I have started to undertake the construction of rover.
I have the Wild Thumper platform and I am looking to control it via a Sabertooth-Pixhawk2 setup.
I am having some trouble understanding how to connect the Saberthooth 2x25v2 with the Pixhawk2. Below I have given an illustration of what I managed to figure out so fare in terms of the wiring. If there is any mistake or advice on how to proceed to connect the Sabertooth with Pixhawk, I would very much appreciate to her about it.
@gpldecha,
What receiver will you be using with the Pixhawk2?
What does your RCMAP look like?
I would start out with S1 connected to the Pixhawk2 Servo Output 1 and S2 connected to the Pixhawk2 Servo Output 2, but you might have to reverse those connections and also adjust the RCMAP parameters to get the Thumper to steer correctly.
I found that I had to mount the GPS module around three inches above the chassis to keep the motor magnetic fields from interfering with the Compass.
Regards,
TCIII AVD
I will be using an FrSky x8r Receiver. I have updated the figure to reflect my new potential setup.
I have not yet connected the Sabertooth to the pixhawk2 and not sure what the RCMAP looks like.
I have just ordered the x8r and FrSky Taranis transmitter. Once I will get this all connected up I will
get back regarding the RCMAP.