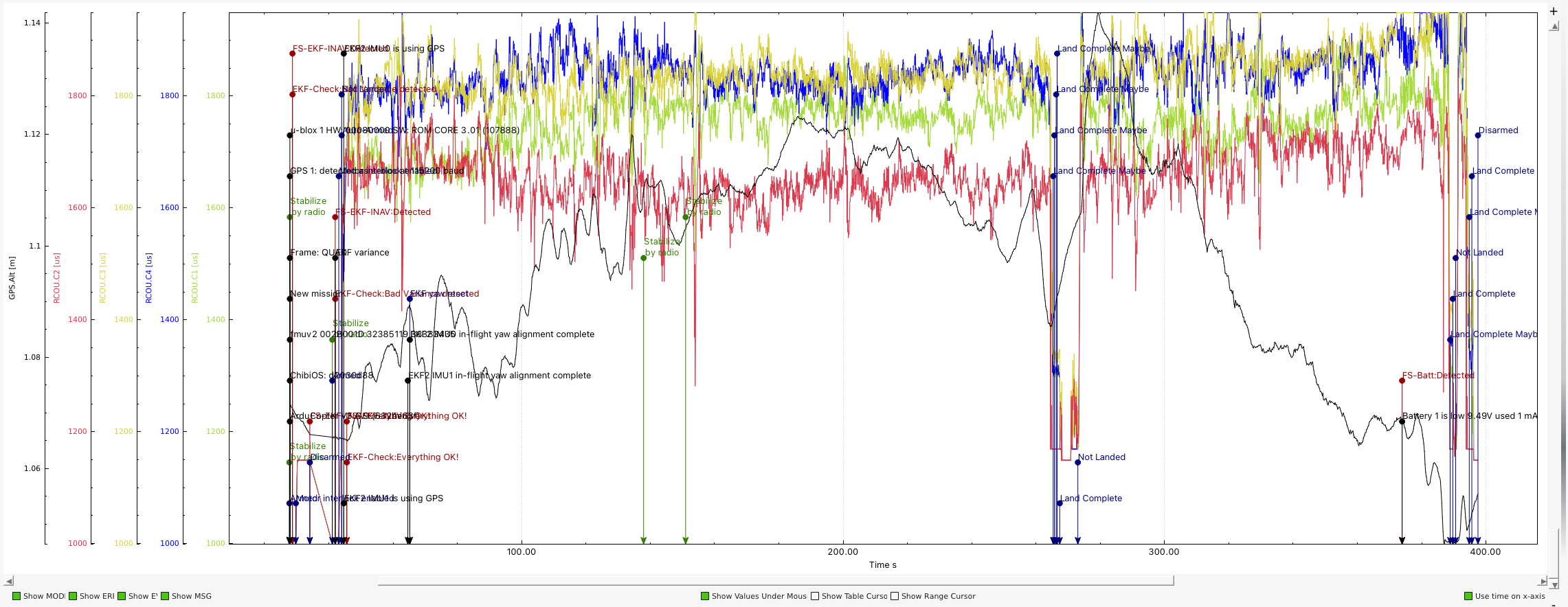
Hello, I have S500 frame with T-motor Air 880kv, 30A Simonk ESC’s and i Pixhawk flight cotroller. I have not done autotune yet but the quadcopter flies really well for 5-6min and then suddenly loses power and lands on his legs even though i put throttle on max and switch into stabilize flight mode when it going down from the sky. I’m getting motor balance test fail, sometimes I dont get it. When looking into rcout data, i see the difference between motors. I callibrated ESC’s, calibrated Tx. Then I changed ESC’s for brand new, re-calibrated everything - problem persists. I have spare motors of different manufacturer, replaced them - no success. I flashed different firmwares on my pixhawk, still the same. I do not want to believe that my motors are too weak because 4 motors thrust power is way above my quad weight. I’m adding log files, i hope someone could help me:) Thank you very much!
I made one more flight, but tried to align the weight of a camera gimbal and battery and center everything, i managed to get 11 minutes of flight and it does not fall from sky. Before that everything was attached more to the front of a quad so rear end had less weight to carry. I’m not sure if this is a true solution.
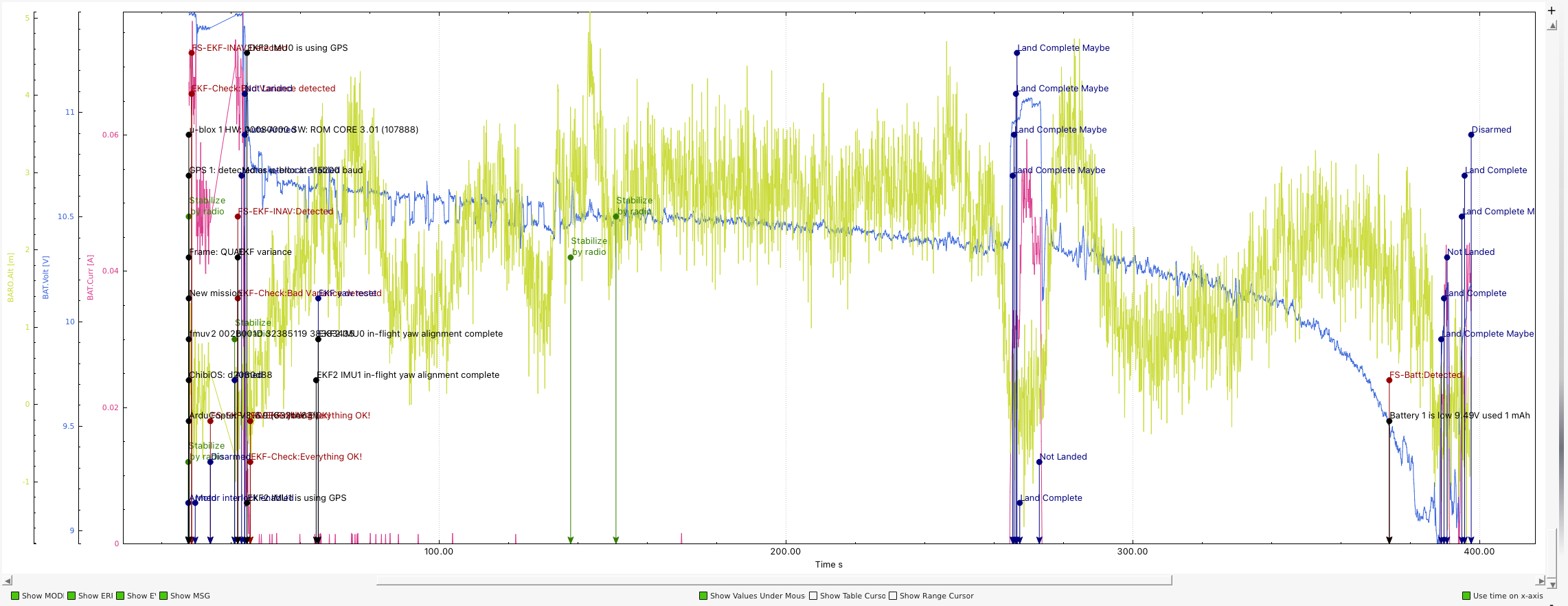
The copter is too heavy/underpowered as your motors are at maximum for most of the flight.
This is where balancing helped as you spread the load out evenly.
I have not calibrated the amps because my props are self tightening so i cannot reverse them in order for quad not to take off but push to the ground. I’m using 3s 5000mah 35-70C turnigy battery. So is it too weak or my motors are too weak? Because i cannot make my drone lighter:/
Thanks for reply and this is what i’m thinking also. Try 4s battery. I’ve measured the total weight of my quad and its about 1700grams with camera gimbal battery etc. Maybe you could suggest how many mah 4s battery to pick in order not to choose too heavy? 10-12 minutes of flight is more than enough for me:) My battery is 395grams now by the way:)
Hmm my experiences say 3k to 6k mah is enough for you
6months ago I have tested f450 with my custom motor + 6k mah + 2 kg it’s given nearly 20min+ (hovering time)
Note :— my motor given 1.7kg at 16.3v + 17amsp and your motor 1200gms so it’s maybe little bit less flight time
Please explain it to everybody. Lots of people jump right in to autotune and get strange results. We need to spread the word!! No shortcuts, do the list posted above, always!
@Liuduosius please do the suff I posted above, do not skip a step. The list above is on the documentation, and multiple times on this forum, but people keep on skipping steps
The result will be the same for either MissionPlanner or QGC - you can use the spreadsheet to determine values, and change exactly the same parameters no matter which software you are using.
But sir my last project not successful on 5inch mini drone with pixhawk 2.4.8 also trying on mini pix but hardly 20s motor so hot also battery and 3 motors are burn on just hovering at 3 to 5cm , i think is that a possible my motor is 2700kv ?





 , i think is that a possible my motor is 2700kv ?
, i think is that a possible my motor is 2700kv ?