I am new to Pixhawk drone and i don’t know much about it. please help me to resolve the below problems as soon as possible… and also provide me with what changes i need to do in my parameters.
I had crashed my Pixhawk hexacopter few day ago as i didn’t know how to fiy the drone. I tried to reslove all the problems and i went to fly the drone again…
But this time i know how to fly the drone now my drone crashed again…
the log file is in the link: log_31_2023-9-3-12-50-16.bin - Google Drive
the parameters are: 02-09-2023-10-45.param - Google Drive
crash video is: https://youtube.com/shorts/FdW2DEMk-KI?feature=shared
thanks in advance:
Likhith
Review the motor numbering and motor order. given how quickly it flipped over I feel there may be an error there. Make sure all the motors are running in the correct direction and the correct order.
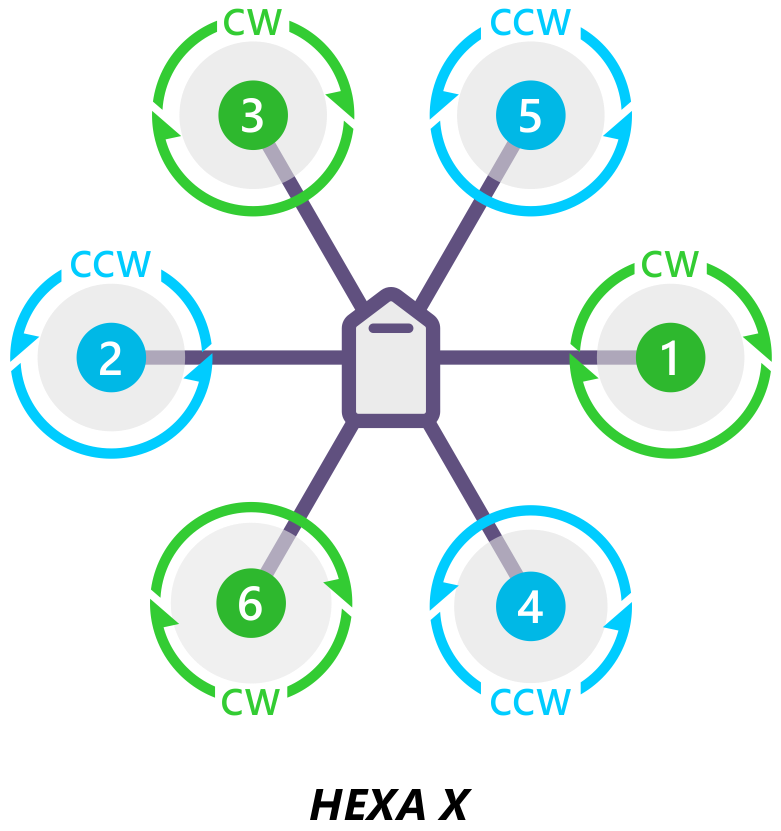
https://ardupilot.org/copter/docs/connect-escs-and-motors.html#testing-motor-spin-directions
The first motor to spin will be the one located directly forward in the case of + configuration, or the first motor to the right of straight forward in the case of X configuration. The motor test will then proceed in a clockwise rotation.
When using the motor test function with a HEX/X, the first motor to spin (motor A) will be #5. The next (motor B) will be # 1, and so on.
1 Like
All motors are running in correct directions as mentiond above and even checked the motor test no issues found…
Thank you for your reply…
Is their any other fault…
If anyone knows to review the log file and find the problem please do it… it would help me a lot.
It’s bit urgent!!
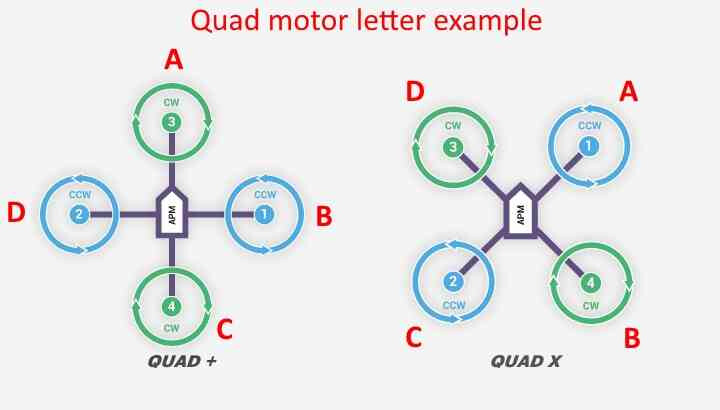
Urgently check the motor order once again, Its ABC not 123. And the props need to produce lift when running in the indicated direction.
And update the Pixhawk firmware to ArduCopter 4.4.0 very urgently
Greetings, Yes it in the same order where you have sent the image
It’s in latest firmware fmuv3 4.4.0 stable version.
Post a .bin log file and pictures of the drone.
Sure you can find images, .bin and .param files in below link:
https://drive.google.com/drive/folders/1f2evV6UMAcj9W9RA60kZSnd26m-sibDe?usp=drive_link
thankyou for your response
The battery voltage is dropping to ~10.8V on that Throttle up. Or maybe that’s when it hit the ground. It rolls over on throttle up so the most likely problem still is the motor order or direction.
1 Like
Motor order is correct… but the drone is raising up suddenly with high speed and going out of control… in pre flight check it displays IMU0 FAST SAMPLING ENABLED 8.0KHZ/1.0KHZ…
Soon after crash it displays yaw reset initialised and many more
That doesn’t mean anything. You do realize that in Stabilize mode you are in full control of the craft, both throttle and attitude?
Yes, Allister is correct. Motor number 2 is spinning in the wrong direction based on the video.
Now we have reinstalled the firmware and built the drone from scratch using the same components…
when i arm and give a little amount of throttle the drone automatically moves to high altitude and tends to move forward and cannot be controlled result in crash…
In HUD it shows IMU0: FAST SAMPLING ENABLED 8.0KHZ/1.0KHZ…
With that BAD HEALTH GYRO… & BAD HEALTH BARO…
I have very less time to resolve this problem almost 30 hrs…
Please help me with the stuff…
this time .bin i.e; log file is not saved in mission planner
That’s normal. It’s a statement, not a warning.
Did you move the drone while it was powering up? Have you redone the calibrations since you rebuilt it?
Logs are normally only saved once the drone is armed. If you want a .bin file to post here to help with arming problems then try LOG_DISARMED,1. Don’t forget to set it back to 0 once you’ve got a file because it can burn up a lot of space for nothing if you leave it on once the problem is solved.
Re calibration done after rebuilding the drone…
Unfortunately logs are not recorded…
Yes while powering thedrone it was moved i.e; lifted in hand
Did you follow this procedure? I suppose not as they are at default.
Setting Motor Ranges
Have a look at this and set your motor spin arm according to it
- set the MOT_SPIN_ARM parameter to (the percentage discovered above + 2%) / 100. I.e. if you found the deadzone of the ESCs was 7%, set MOT_SPIN_ARM to 0.09 (i.e (7 + 2) / 100).
- set the MOT_SPIN_MIN parameter to at least 0.03 higher than MOT_SPIN_ARM. I.e. if MOT_SPIN_ARM was 0.09, set MOT_SPIN_MIN to 0.12.
Sure I’ll try this…
But does it solve sudden raise of altitude at uncontrollable high speed…
This problem occurs in all flight mode
Yup it should. And also check your rc calibration again