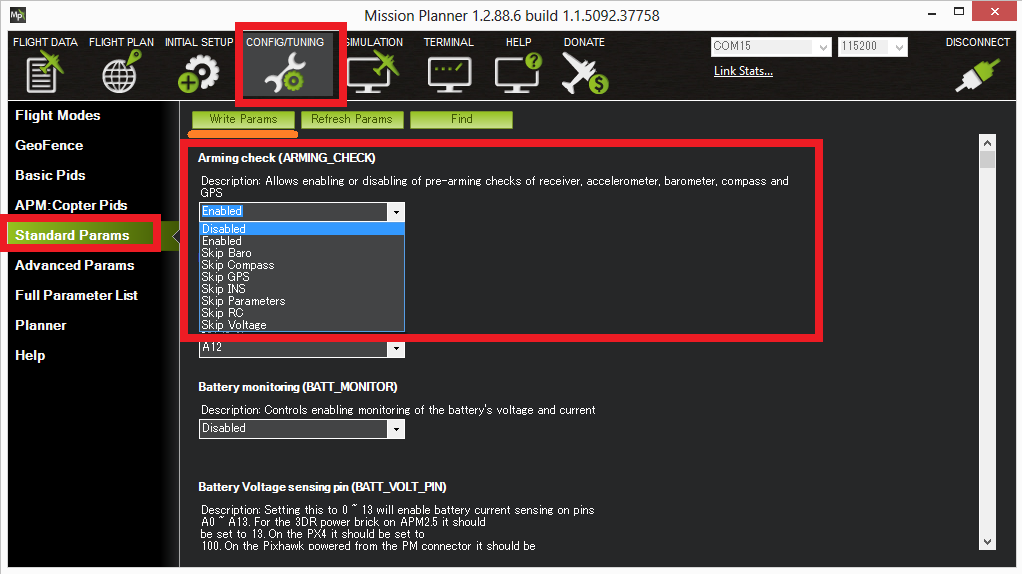
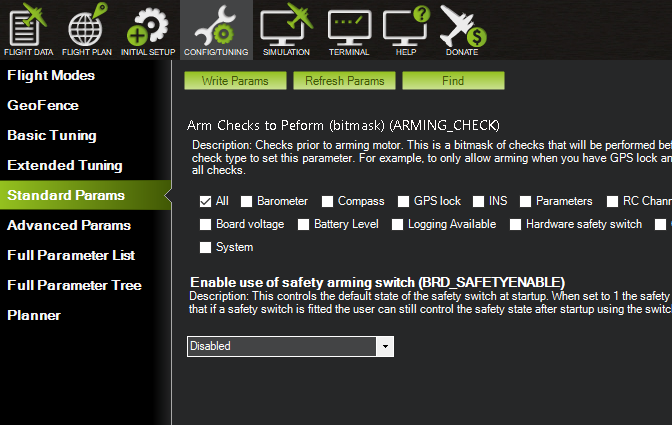
I am trying to get EKF 2 to function properly on my Pixhawk 2. When the Pixhawk turns on, the led flashes “double yellow” and the indicator on the mission planner HUD shows EKF in red text. When clicked on, a panel appears that shows velocity_horiz Off and pos_horiz_abs Off in red text. I have attached a picture of this below.
I haven’t setup an RC controller, so I assume that that is the source of the RC errors. Apart from that, the messages panel contains very little information as to what could be wrong. Once the MavLink connection has been established, the following is logged:
as anon67614380 said it because of high HDOP it will go away when HDOP below 1.5.
you need more than 7 satellite.
and note that flying in loiter with lower than 12 satellite is not good and dangerous.
its better to see logs from your fc
set these parameters :
LOG_DISARMED=1
LOG_REPLAY=1
and turn on your fc and arm motors but not fly then send log file for a better analysis
But i am facing another problem. My copter will be fly always in indoor. i have used range finder for indoor fly. When EKF signal is RED then can not get value from range finder sensor (i mean altitude value fracture or use barometer). When EKF signal is good then work and get value from range finder sensor. As my drone will fly always in indoor. So there are bad gps signal. So how i will overcome the issue. Help me.
Thank @hosein_gh for you quick replay I read that link. My Rangefinder (Maxbotix analog) work properly and get sonar value. i think there are no problem. Problem is that When EKF red then pixhawk read from barometer. When EKF is white then pixhawk read from maxbotix and working well. You know my copter always fly in indoor. so there are high HDOP in indoor. as a result EKF always RED and use barometer sensor for altitude.
I did AHRS_GPS_USE to 0 and did not found GPS_FAILSAFE. Even i disconnected all of GPS wire connection from FC. Now i got EKF status is white. But there are raise an another issue. FC did not use altitude value from range finder. It FC also used barometer.
Thank you everyone for your replies and help. I had forgotten about this because I have not flown in awhile. @anon67614380 and @hosein_gh your solutions were correct. Thank you very much.