HELLO MY F450 DRONE WITH PIXHAWK FLIGHT CONTROLLER IS DESCENDING DOWN WHEN I SWITCH TO LOITER OR ALT HOLD MODE. I AM USING M8N GPS AND COMPASS MODULE. THE MODULE IS WORKING FINE I HAVE TRIED IT EARLIER WITH APM 2.8 FLIGHT CONTROLLER. IN STABILIZE MODE IF FLYING SUPER STABLE AND WITH NO PROBLEM. I WOULD BE THANK FULL IF SOMEONE SOLVES MY PROBLEM AS SOON AS POSSIBLE. I AM ATTACHING LOGS OF MY FLIGHT. I HAVE FLASHED MY PIXHAWK WITH 3.6.9 FIRMWARE.
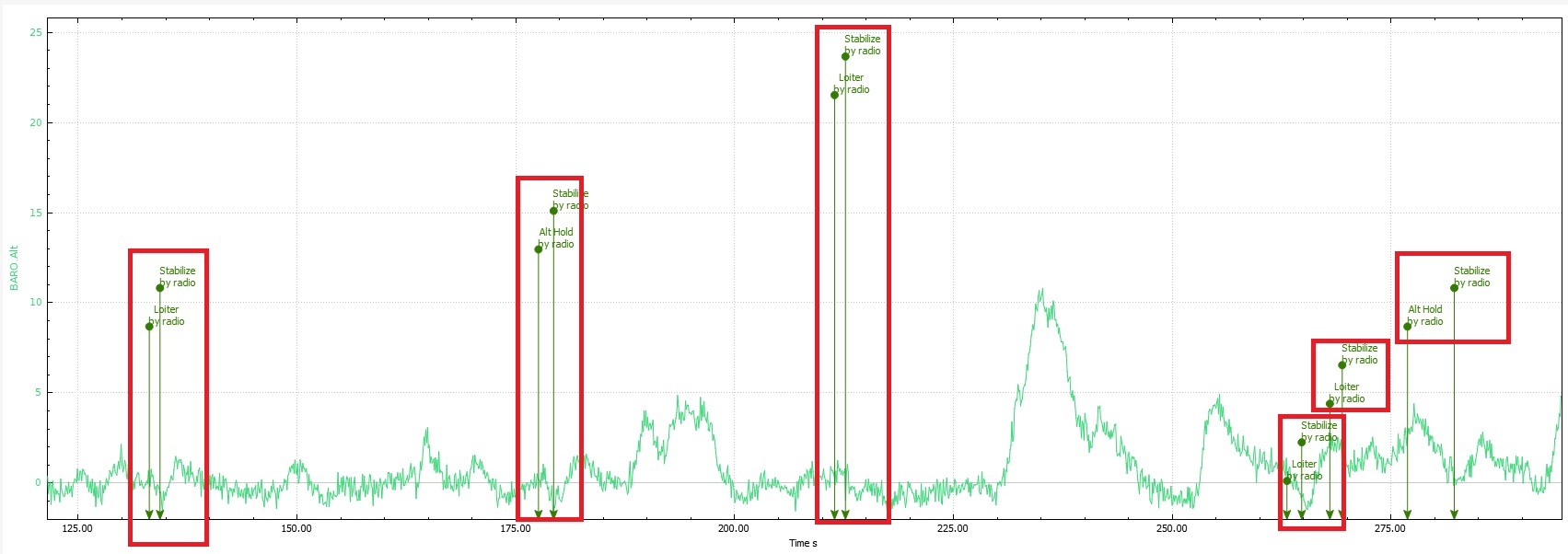
it seems that every time you enabled loiter or alt hold mode after a short time your flight mode changed to stabilize by radio and in stabilize descending is normal because FC is not controling altitude.
if you do it by yourself try enable loiter in more height or takeoff with loiter !
if not please check these items :
Just to confirm is my flight controller defective ? Because even at very low height the drone would stay still when i was using Apm 2.8 with 3.2 firmware version.With pixhawk its flying great too but the problem is still there when i switch to loiter or alt hold mode. I have recallibrated the radio also checked the flight modes. and checked all the aux switch separately. but the problem still there. So please help me again. I would be very greatfull.
I HAVE TRIED TO KEEP THE THROTTLE IN MIDDLE POSITION BUT STILL THE DRONE DESCENDS DOWN WHEN SWITCHING TO LOITER MODE OR ALT MODE. IS MY FLIGHT CONTROLLER DEFECTIVE ? PLEASE HELP AGAIN . I WOULD BE VERY GRATEFUL. THANKS AGAIN
Please check that your MOT_HOVER_LEARN is equal 2
It seems that your copter didnt learned hover throttle
Also please send a picture of your l2c port or hub
As my experience conflicting modules will force pixhawk to land
Yes I have checked that MOT_HOVER_LEARN is equal to 2. I am attaching the picture of my l2c port. Please help me more if you can. I really need help and want to fix this issue as soon as possible.
I can’t find your problem from your last log
Please arm copter and switch to loiter with at the least 8 satellite count and try to take off and fly till 5m altitude and try to hover it then send log file for analysis.
Tip :When you rise throttle stick more than 60% in loiter mode your copter will take off
Keeping the throttle in middle works loiter and altitude are working fine. but can it be possible to switch to loiter mode and make the drone hover at a place when the throttle is below middle position.
Keeping the throttle in middle works loiter and altitude are working fine. but can it be possible to switch to loiter mode and make the drone hover at a place when the throttle is below middle position.