We can usually understand the situation from just one log file.
These copters are a whole system, so you cant really expect a result from changing 1 or 2 parameters and ignoring vibrations.
So you flew the copter with basically the same issues as before, and no surprises - it still behaves the same way!
If that is a Lipo battery then you are killing it by ignoring the correct battery settings.
If you want a more reliable copter you need to start by setting all the safety related params I specified - and these are just common sense and well documented. I’m not suggesting anything crazy or controversial.
X axis vibrations are bad, indicating an issue with the flight controller mounting, or something is touching it or wiring is pulling it one way. Once vibrations have been attended to (but dont fly yet), set all these:
AHRS_EKF_TYPE,3
ARMING_CHECK,1
ATC_RAT_PIT_D,0.004
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.0033
ATC_RAT_RLL_I,0.10
ATC_RAT_RLL_P,0.10
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.80
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_FS_CRT_ACT,1
BATT_LOW_VOLT,21.60
EK2_ENABLE,0
FENCE_ENABLE,1
LOG_BITMASK,180222
LOG_REPLAY,0
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
PILOT_THR_BHV,7 // you appear to have a spring-centered throttle
Now just do a small test flight starting in Stabilise mode and if that is stable enough, switch to AltHold and try some gentle movements - nothing radical and do not go to Loiter or Auto missions.
The hover thrust might need some time to learn. The pilot throttle behaviour change will really help in AltHold too.
Let’s see that log file.
EDIT:
For any further tuning you need to take the payload off, particularly if it is a camera gimbal. Anything that can move or vibrate is bad.
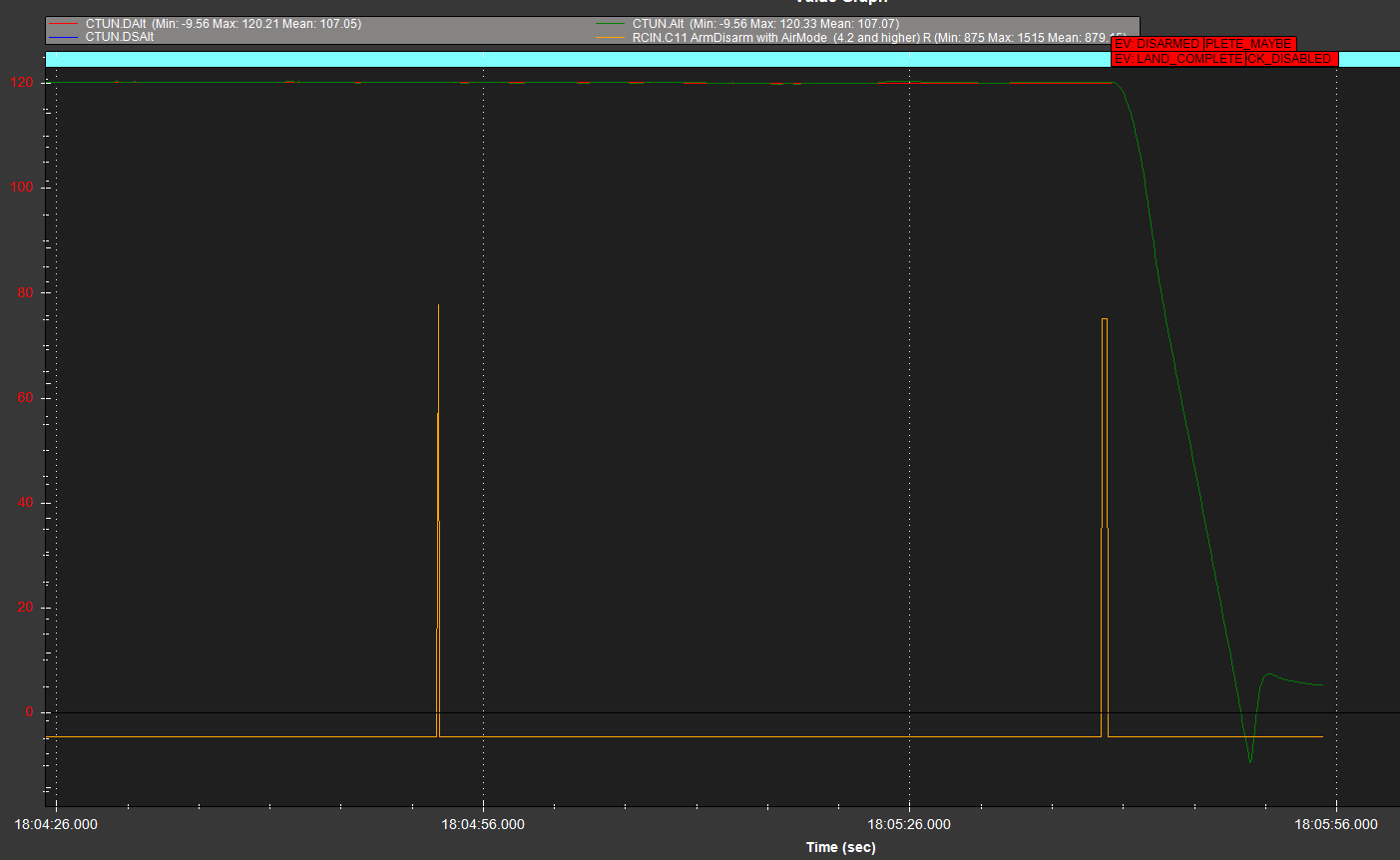
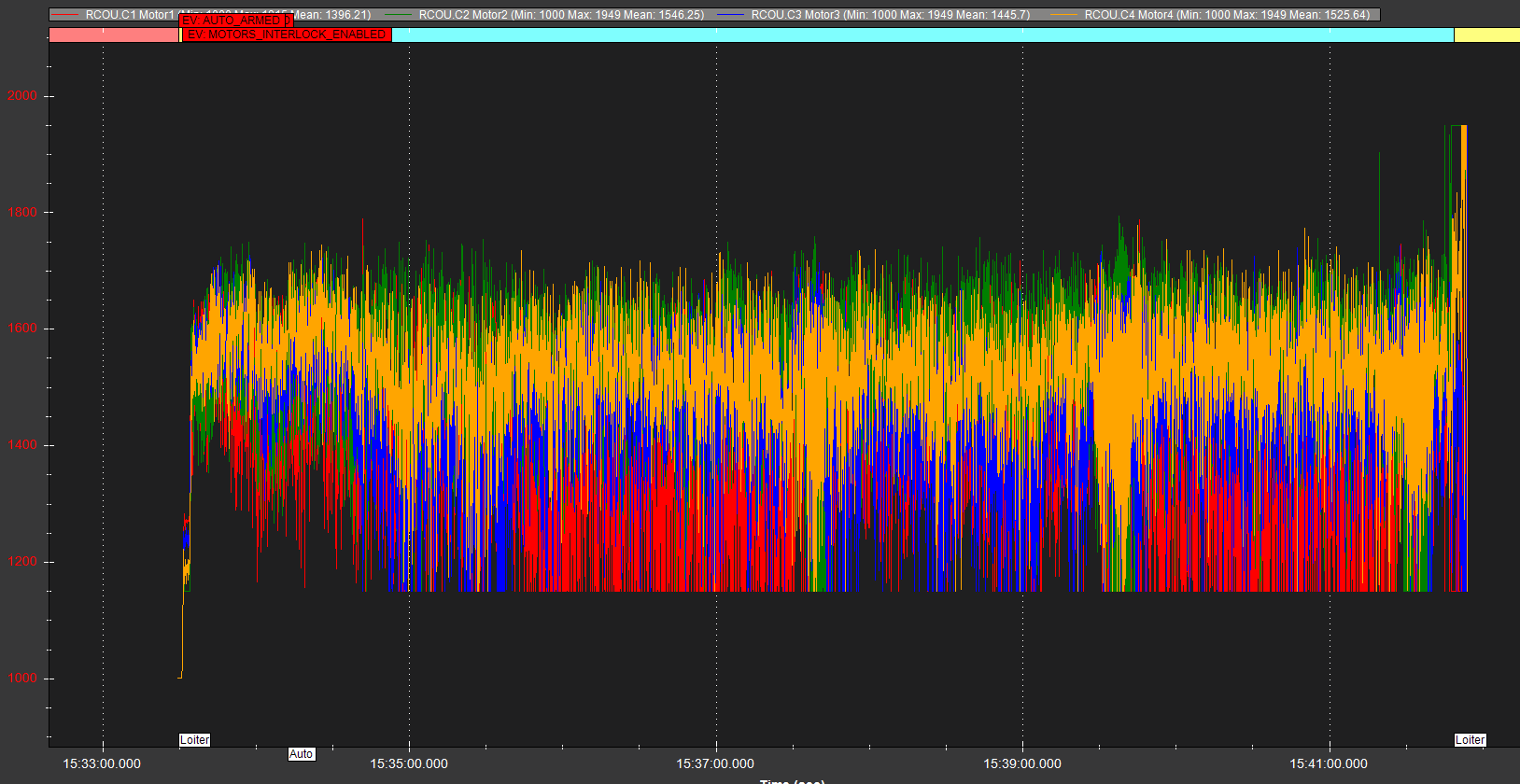
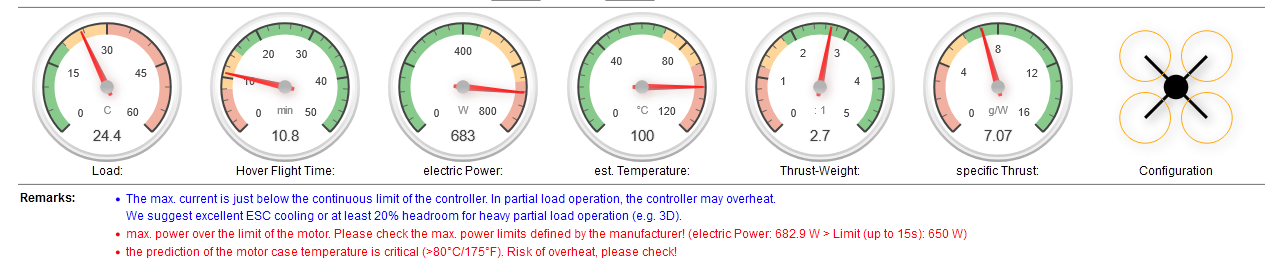
Assuming the attitude tuning can be completed OK, I think those motors and even ESCs will give you trouble in the long term. They are OK at hover throttle, but when pushed (ascending or fighting any wind) they will quickly overheat and potentially even fail.