Hello All
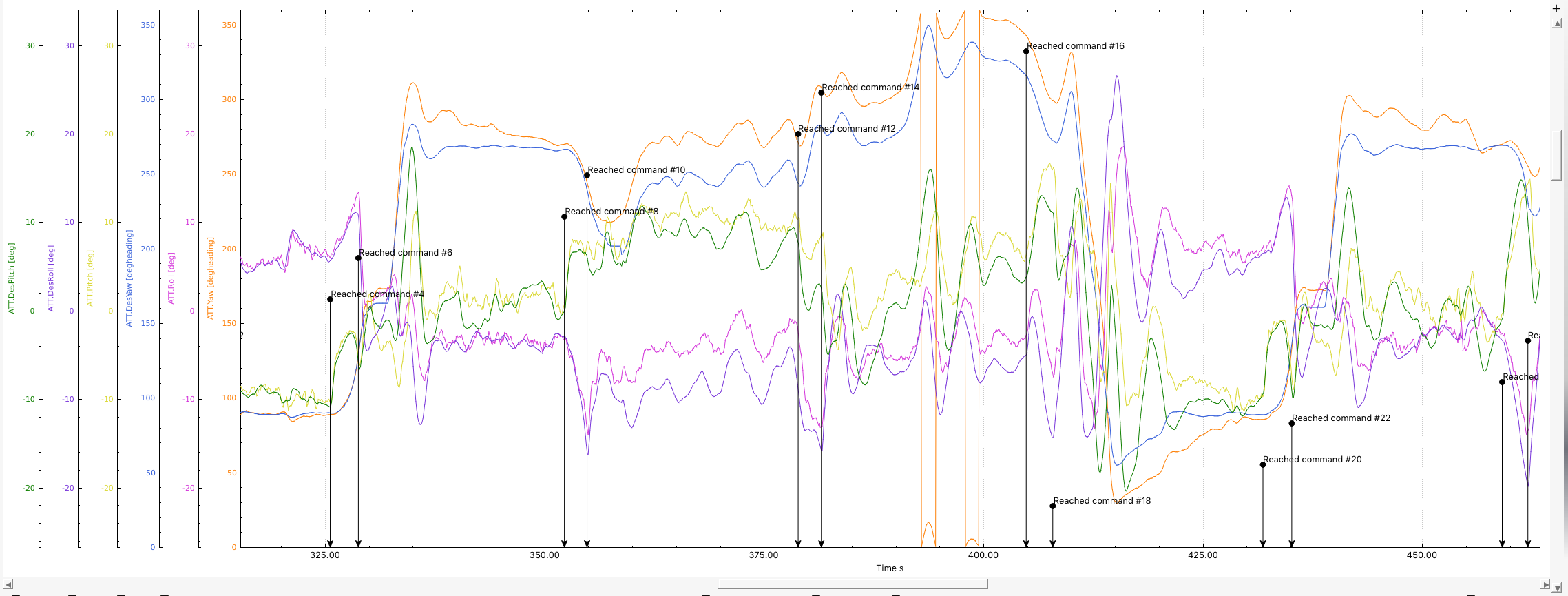
I am working on Foxtech Hover Frame, with Pixhawk cube on it , running on latest firmware. I Started to perform waypoint mission with it, but it seems it is having issues when it is turning at the end of each waypoint, specially its Yaw behavior is erratic ,and seems it is not following course properly. Would like to know what might be the reason, uploading the log too.
Adding a bit of weight might fix this problem, like a slightly bigger battery.
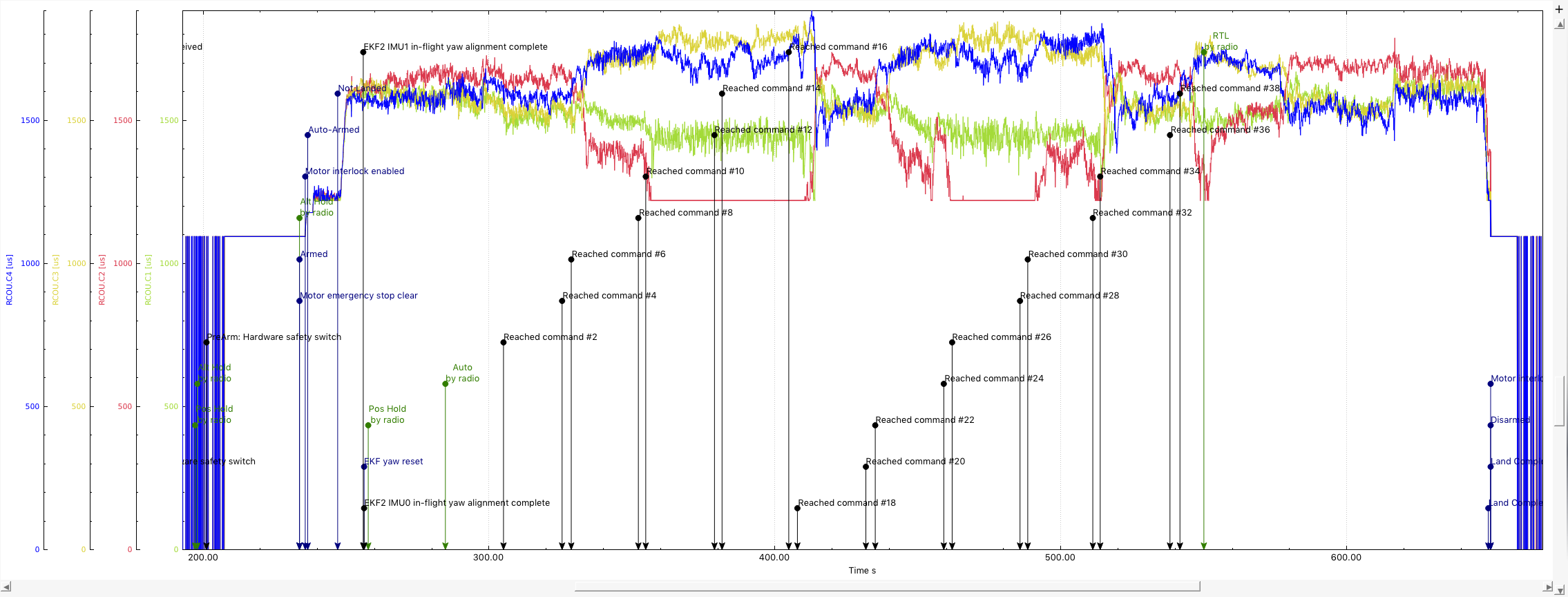
But there is a definite difference between CW and CCW thrust.
And what is with the 0 to 1100 pulses before and after arming?
Didn’t auto tune the frame yet, planning to do tomorrow. I will look in to the mentioned points today regarding motors . I will update once the changes are finished.