We have tested pixhawk on the ground level and I measured the altitude above the sea level. but altitude varies continuously.
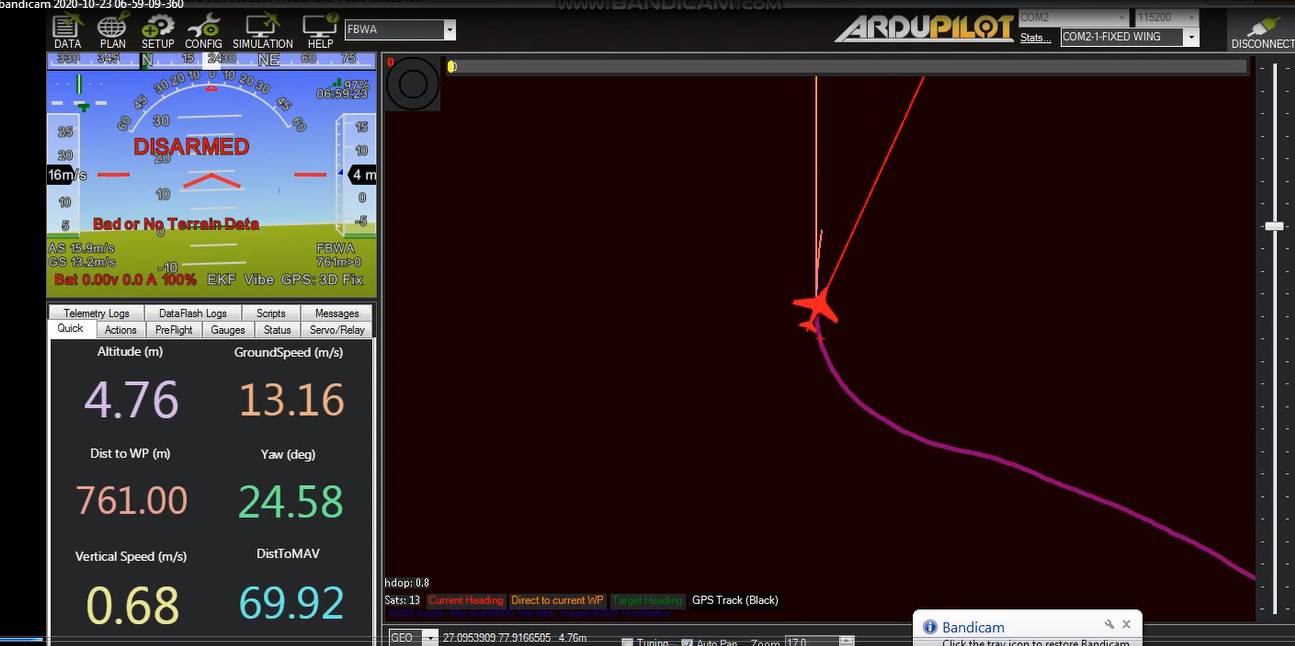
In the second test, we have seen data when our drone fly but the altitude show only 4-5 meter but our drone hight more than 200 meters. This time I measure altitude above ground level.
Please sir help me how can I get the right value of altitude?
You need a proper GPS signal. Baro altitude is always relative to some almost arbitrary reference point. The drone reset the altitude while arming. Have you armed?
on the mission planner is shown “Bad or No Terrain Data”
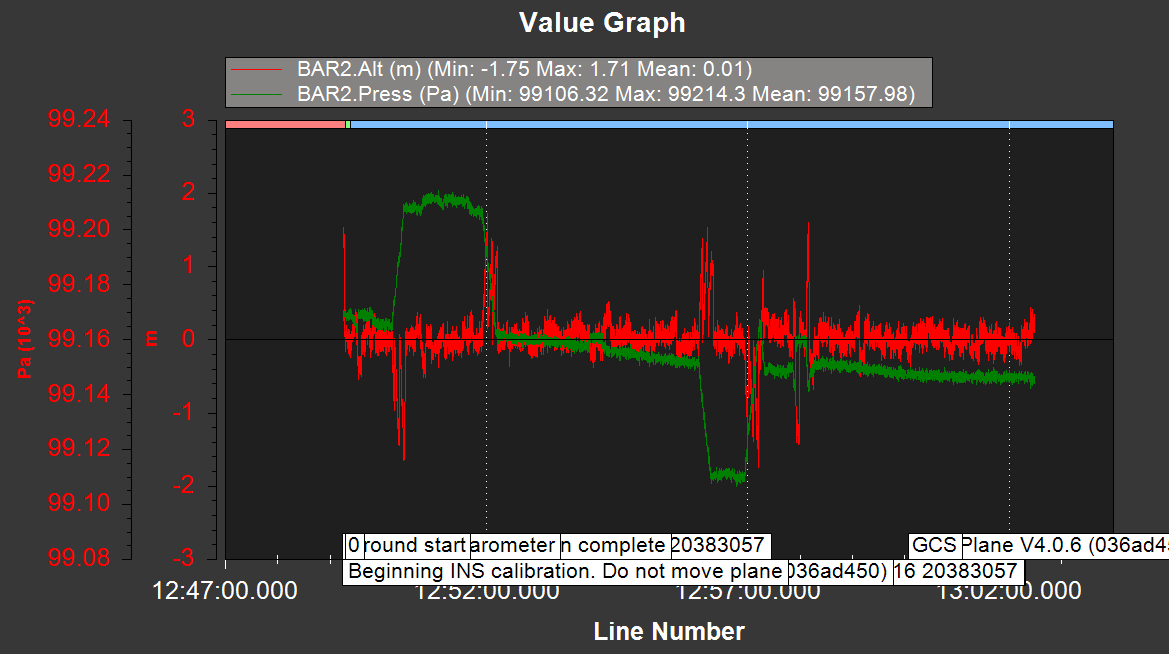
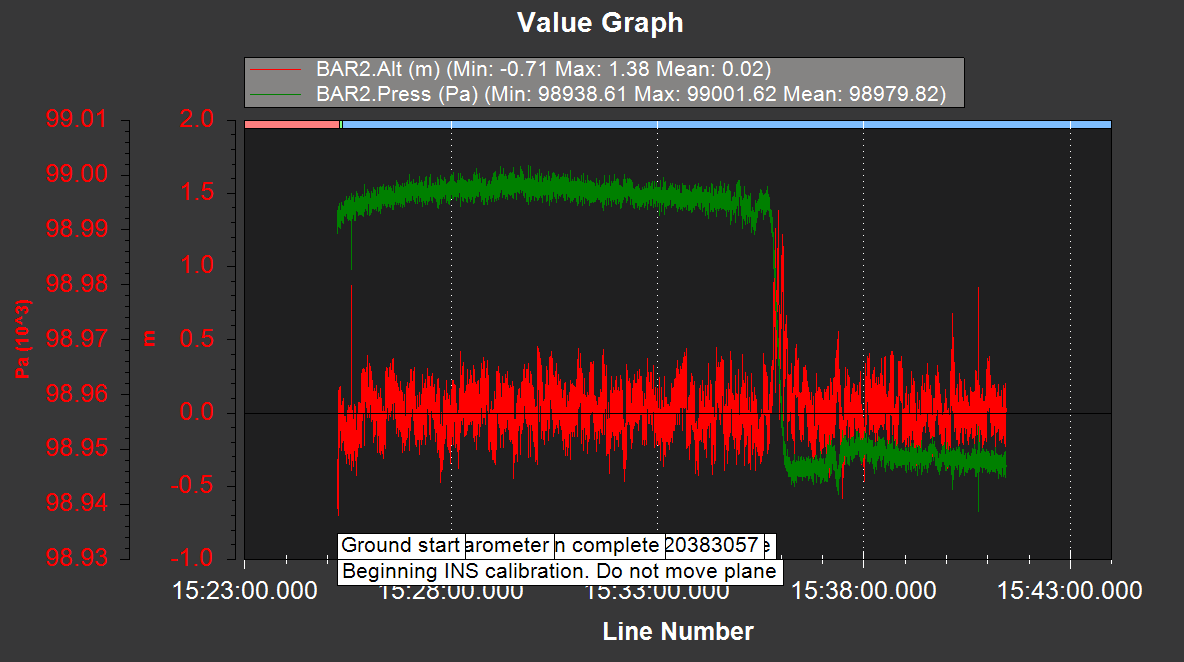
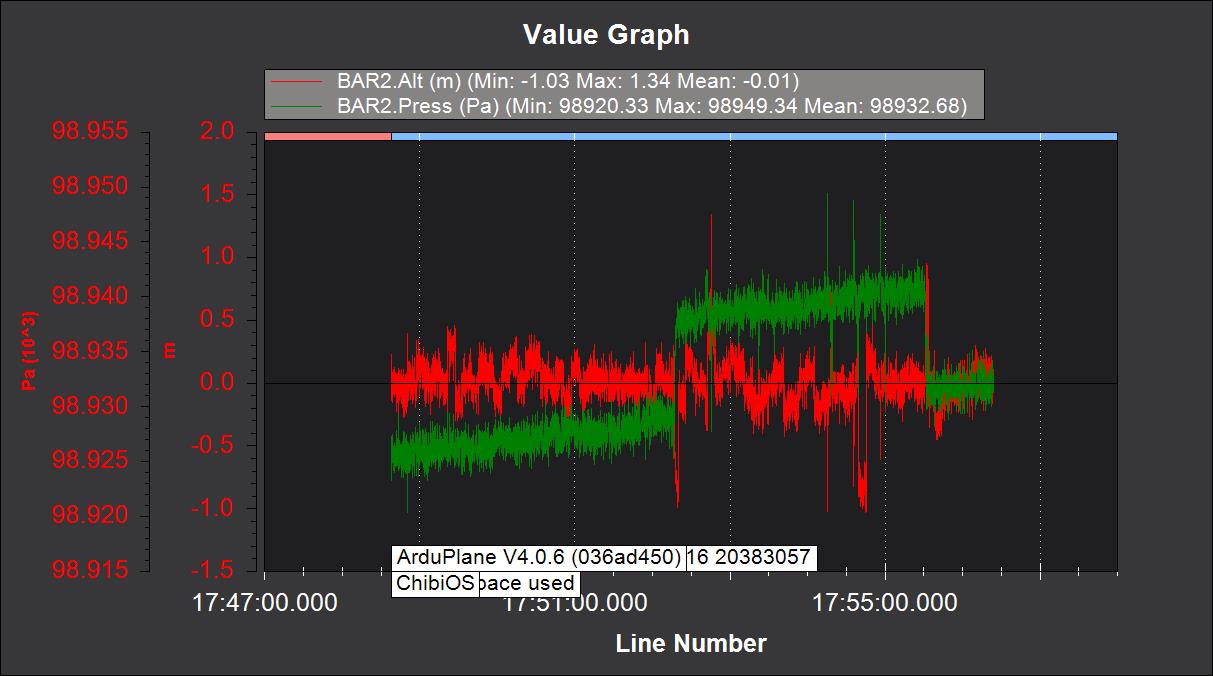
In the image red color shown altitude and green show pressure(pressure change according to height)
Most of the arducopter altitude information is relative to the home location, and not absolute altitude. There are multiple altitudes is the ardupilot software, relative, absolute to mean sea level (AMSL), above ground level (AGL) and many more. Read the docs.