hi everyone
i have a problem with this new build when i try to takeoff with stabilize copter start yawing
i double checked these items :
-motor direction
-motor numbers connected to FC
-ESC calibration
-radio calibration
-compass calibration
does i forgot something in this new build ?
config is :
ArduCopter 3.6.11
frame : f450
motors : air gear 350 with t9545 propellers
FC : CUAV Pixhawk
external compass
Today when i tried to arm my copter it didn’t arm with compass not calibrated message
When I checked wires I found that my l2c socket of external gps has been damaged while assembling and it makes noise
But @rmackay9 is it a bug that my copter not trying to switch from primary compass to secondary When copter is armed or I missed something in configuration?
If you still have that compass marked as the primary, then you will get an error.
Its logical that the code will check the hardware you have told it to use, and give you an error if it cant.
A fall back in flight would be expected, but on the ground you definitely want some notification something is not as you configured it.
@mboland
yesterday copter was yawing immediately after takeoff because of damaged l2c cable so my primary compass was not working as expected but copter was in air , as i learned from source code i think it must switch to secondary compass (internal) but it didn’t
it could possible because of my flight time is not enough to detect compass issue and trigger EKF fail safe and switch to secondary compass then land
is i’m correct ?
thanks for help and describe how ArduCopter works on code level
Your parameter file shows COMPASS_USE2 at 0. You could try enabling it the offsets are not bad. There is some odd noise on it though. Even with it disabled it’s still logged. And not that it would matter here but the GPS wasn’t showing anything.
hi @dkemxr
yes in this log COMPASS_USE2 is 0 because i was testing for problem as i know before my internal compass is noisy
GPS is not showing anything because i was testing in home
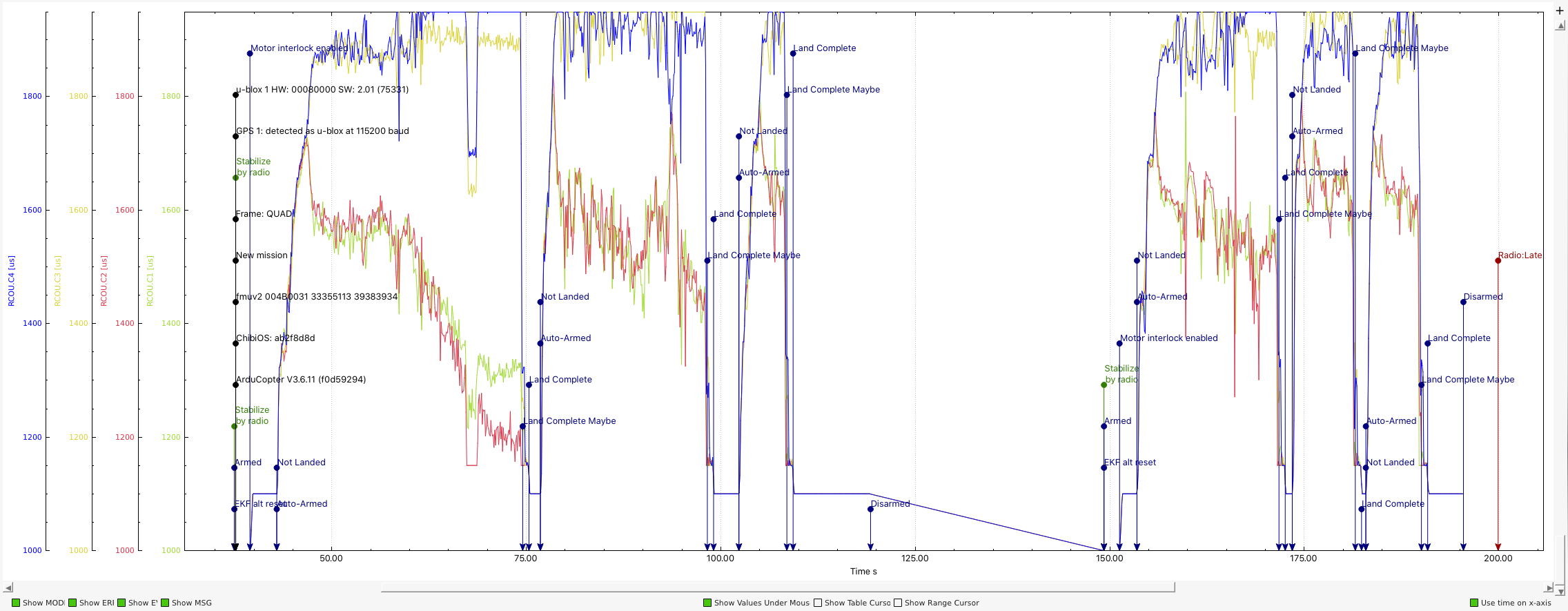
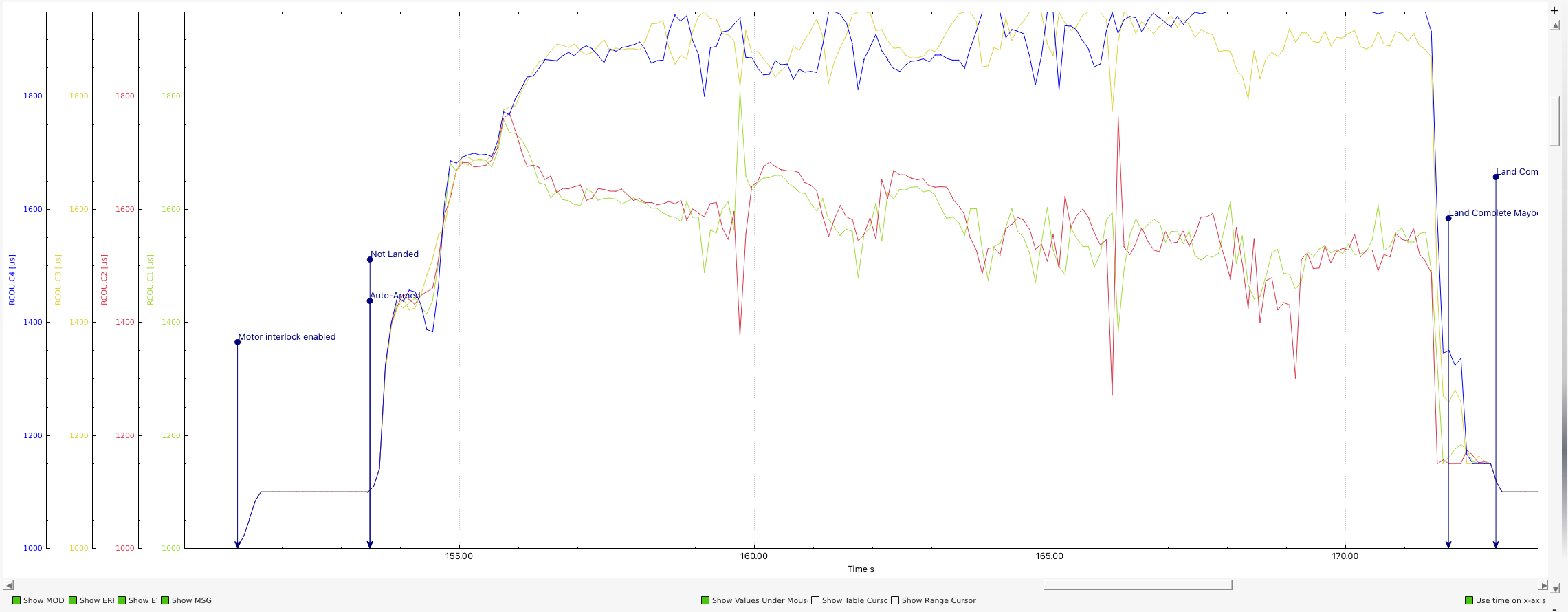
I haven’t opened the log file but from reading another of the comments it looks like the log doesn’t show the yaw on takeoff. I wouldn’t assume that the yaw on takeoff is because of a bad compass. If you have the log with the yaw on takeoff can you post it here?
… so based on @mboland’s graph it’s probably an issue with an ESC not being calibrated or more likely one or more of the motors isn’t pointing straight up.