hi
i need some help about troubleshooting my hexacopter.
in flight my copter is stable and act good but :
1- in my video i have jello and i want find out this jello is because of my copter vibration or my gimbal is not working correctly.
2- always i have compass error ( Compass = FAIL - Large change in mag_field (40.64%)
Max mag field length (634.55) > recommended (550.00)) and both of my compass are calibrated and health of mag is good as QgroundControl said.
3- always i have motor balance warning (Motor Balance = WARN - Motor channel averages = [1658, 1563, 1580, 1643, 1571, 1652]
Average motor output = 1611
Difference between min and max motor averages = 95) but i calibrated my ESC and my motors are same.
4- some times i have this error (NaNs = FAIL - Found NaN in CTUN.DSAlt
) and i dont know what is that.
these error relay confused me and i cant find the reason of jello.
my config is :
frame : Tarot s550 pro
motor : XXD a2212 930kv
ESC : hobbyPower 30A
gimbal : tarot t4-3d
flight control : pixhawk (cuav) 2.4.8
battery : tattu 3s 10000mah
gps : ublox m8n
propeller : emax 10x45
thank you Mike Boland for your help
so do i need an Accelerometer Calibration ? or i must re calibrate my ESCs ? to balance my copter.
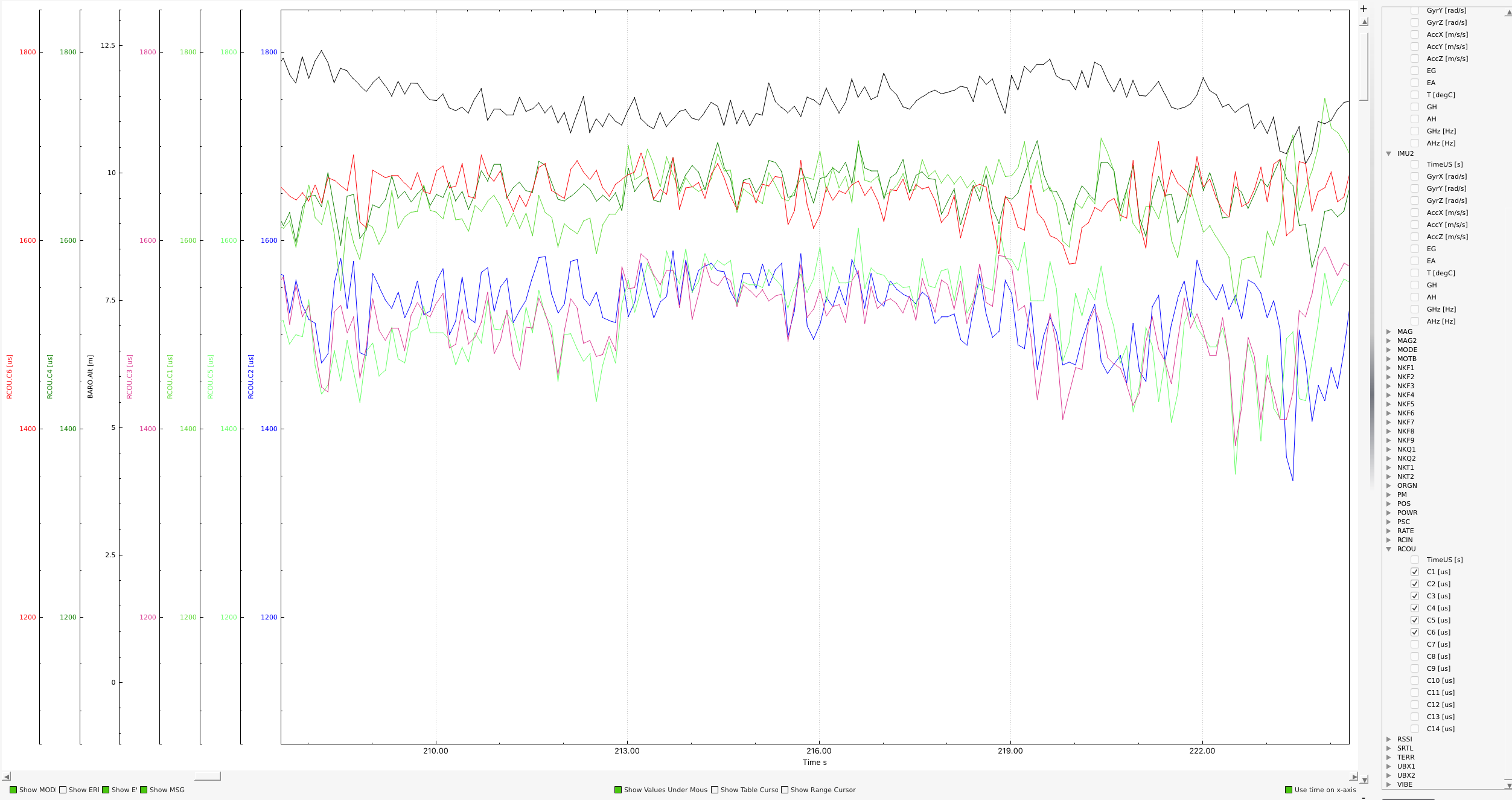
and how do you analysis imu value and how do you recognize my copter is unbalance from RCOUT values ? i think you calculated difference between min and max for unbalance. is it correct ?
Mike is talking about the physical or “static” balance of the aircraft in roll and pitch around its Center of Mass.
When a multi rotor aircraft is not balanced, to keep the frame level, the flight controller has to feed different PWM signals to the motors. In and ideal situation the motor PWM values will be equal.
After looking at the RCOUT values for motors 1 thru 6 it is clear (at least to me) that your quad is “heavy” on one side. Motors 2, 3, and 5 are getting PWM values that are roughly equal, and motors 1, 4, and 6 are getting similar PWM values, but motors 2, 3, and 5 (which just happen to be on the LEFT side of the aircraft) are getting smaller values than motors 1, 4, and 6 are getting. What this tells me is the aircraft is “heavier” on the RIGHT side, and this “weight” is shifted AFT and RIGHT towards motor 4…
Your compass errors may be caused by flying in an area with a significantly higher magnetic field than where the compass was initially calibrated.
For the “jello,” it can be caused by having the gimbal mounted using Tarot Gimbal Hooks, and it can also be caused by prop wash hitting the camera and/or the gimbal.
I have two gimbals. One is a simple 2 axis with an 8-bit AlexMos controller. The other is a 3 axis with a STorm32 controller. I have the 2 axis on a Tarot 680 Pro Hex. I have the 3 axis on a slightly stretched Tarot 650 Sport.
To mount the gimbals I cut some scrap plastic to make a plate. I added 4 Tarot 10mm Mounting Rings to each plate and then I used threaded stand offs to mount the plate to the gimbal. Click the link:
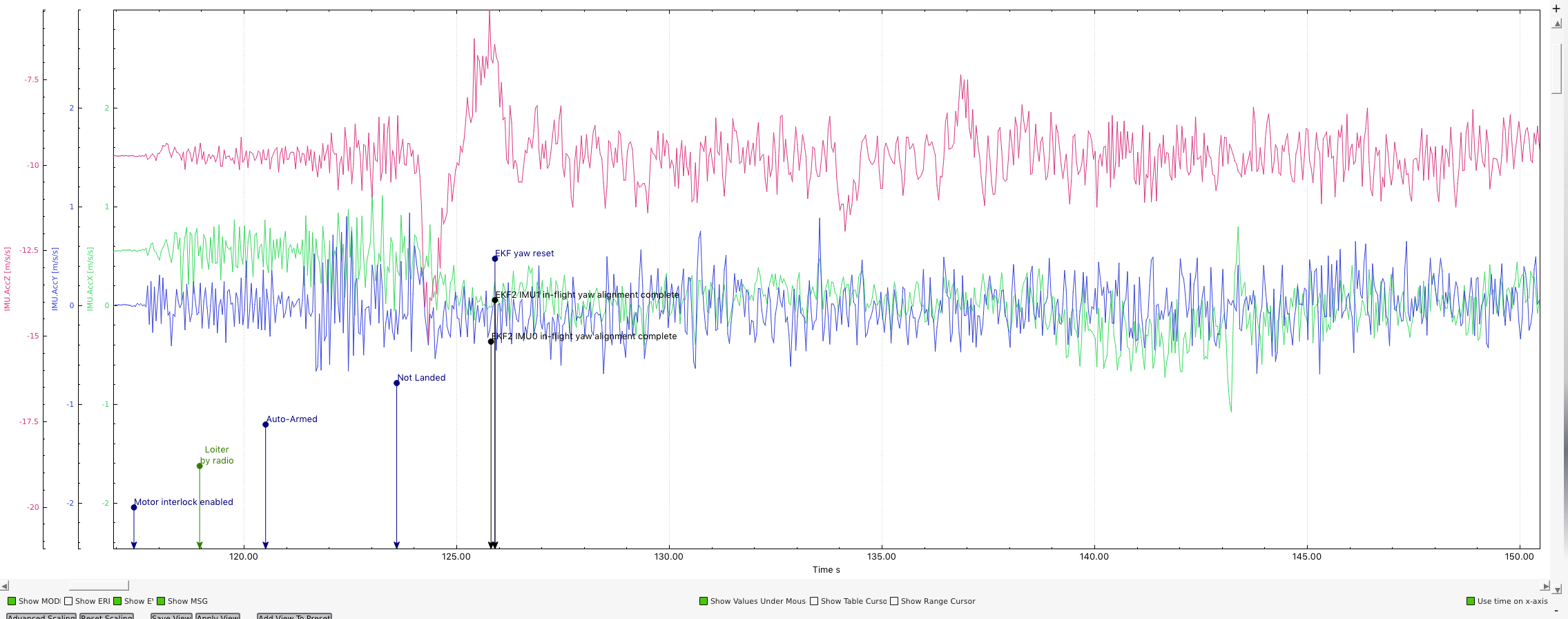
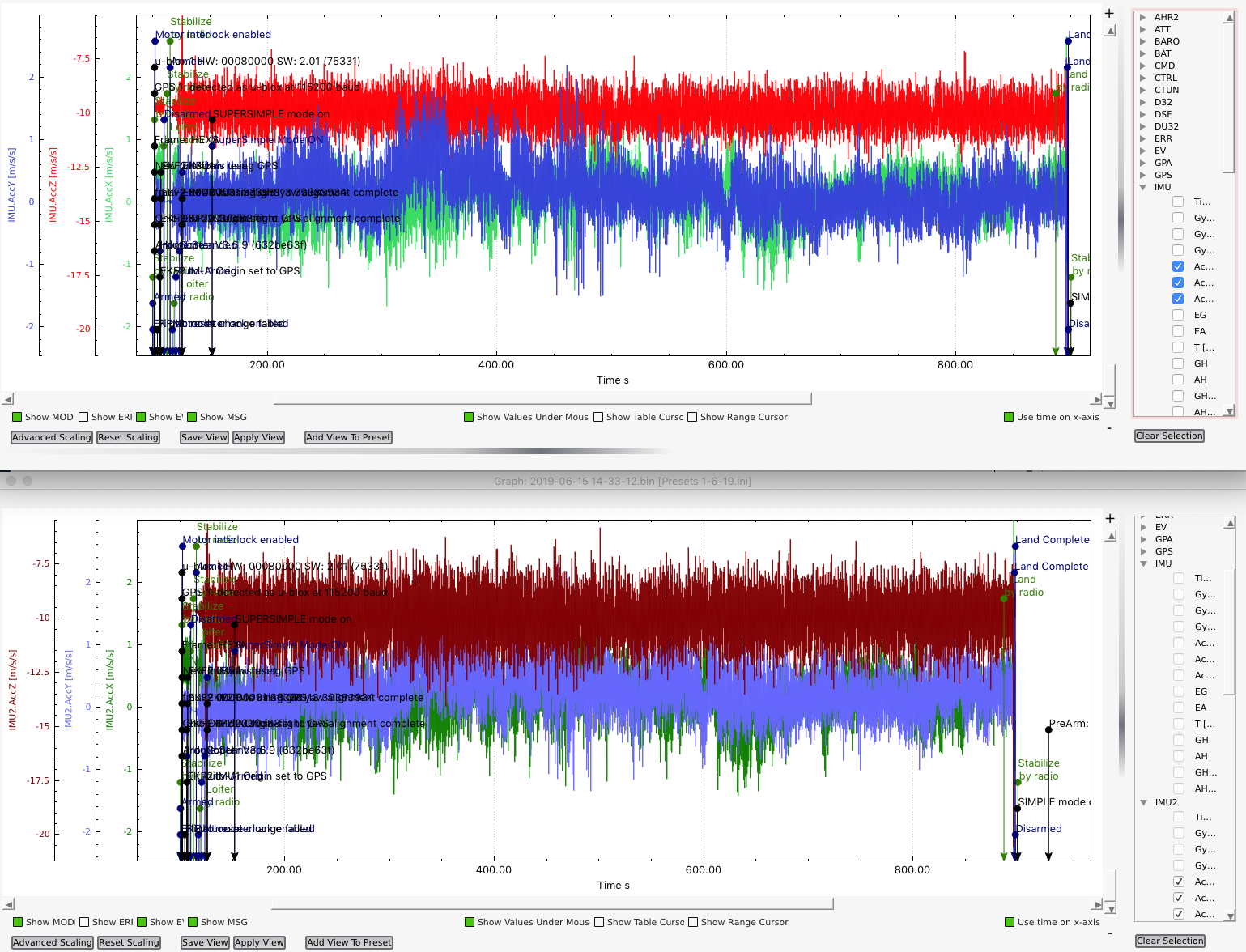
One last thing. Using Auto Analysis is fine for a “quick and dirty” analysis, but to get down to the nitty-gritty you need to use “Review a log”. This will give you access to every thing and you can display things like battery voltage, current, total current used, RCIN and RCOUT data, or what ever as a graph plot. Then, by right clicking in the plot window and selecting “Show Point Values,” hovering the mouse cursor over a plot will show you the value logged at that particular line number.