hi
today my hexacopter crashed after many successful flight
after analyzing log i think reason of crash is compass, because i’m using external compass (build in M8N GPS) on my canopy and today canopy not fitted correctly and it was vibrating in air.
is it true ?
or reason of crash is something else ?

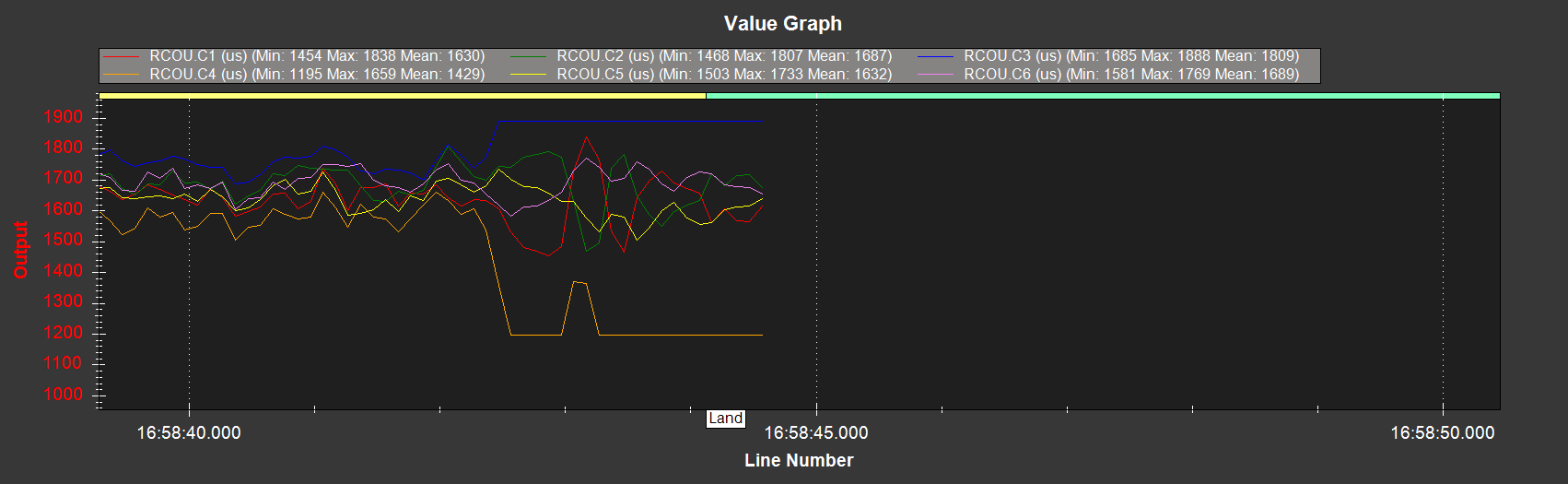
It’s good that you found the problem - I just looked to confirm and also for my own experience, RCout3 goes to max (the dead motor or ESC) and RCout4 goes to minimum to try and compensate.
Hi shawn
Thanks for helping 