Hi,
I’m a bit lost…
I want to wire a Rover with 4 motors, but on ArduRover documentation I only find how to wire one motor and one servo for direction (I have 4 motors and 1 servo).
Do you know where on the Pix6C I can wire the motors ??
Thanks,
Hi,
I’m a bit lost…
I want to wire a Rover with 4 motors, but on ArduRover documentation I only find how to wire one motor and one servo for direction (I have 4 motors and 1 servo).
Do you know where on the Pix6C I can wire the motors ??
Thanks,
What functions do you want those motors and servo to provide? What is the steering mechanism?
For the motors I need to move forward and backward, and control the speed : I’m using wheel with integrated motors (4 wheels). + controler.
Previously all was warking on a DroPix, but I’m a bit lost to wire them on the Pixhawk 6C.
The steering mechanism : a servo permit to steer two wheels…
Before flash the Pix6C with ArduPilot, I can control the steering with chanel 3, but now, with ArduPilot, it’s not working anymore and I don’t find which ouput are “linked” to a function (motor 1/2/3/4, steering etc)
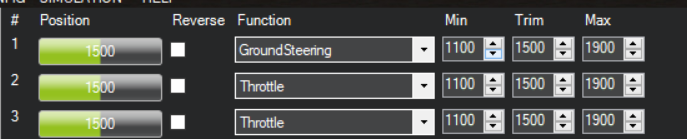
Set as many outputs as you need to “throttle_left” (73) and “throttle_right” (74) and connect the controllers accordingly.
If you have 2 wheels/motors/controllers left and 2 right, set servo output 1 and 2 to “throttle left” and servo output 3 and 4 to “throttle right”, for example.
Ok so for example I put 73 to servo 1 and 2, as on the picture.
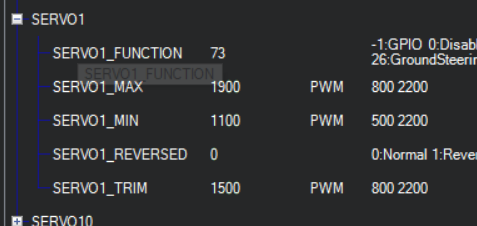
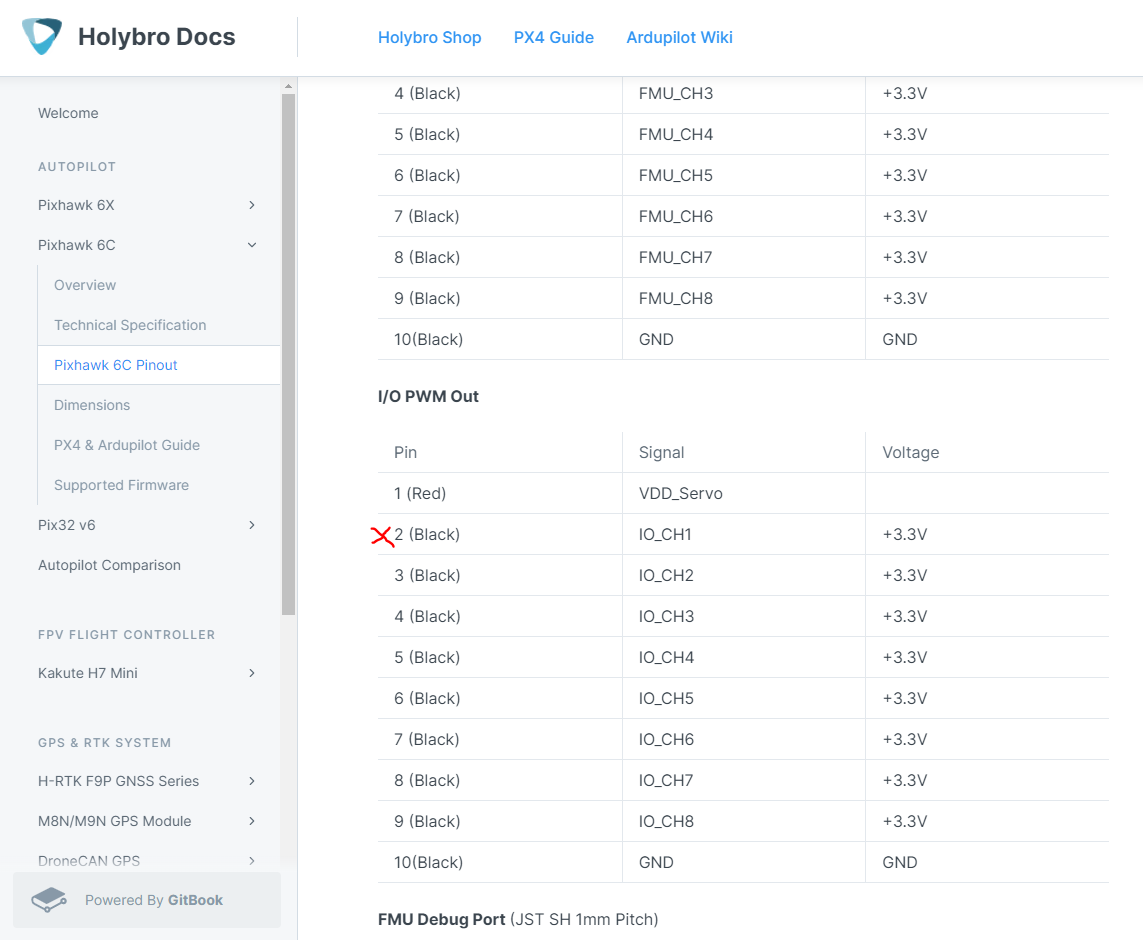
But how I can “link” this “servo1” with the hardware output of the pix6c ?
Servo1 match to “IO_CH1” ?
Setting SERVOx_FUNCTION to a valid throttle output should be all that’s necessary. I’d venture a guess that IO_CH1 is mapped to SERVO1, but I have not yet looked at the hardware definitions (EDITED to match @count74’s reasonable expectation below).
What firmware version did you upload? Your board is not supported under the present stable release.
For a rover it should not matter if you use the I/O or FMU outputs. Simply test the output numbering by setting servo output 1 to an RCin channel for example and see if you get a signal on FMU PWM pin 1 or I/O PWM pin 1.
On the original Pixhawk the Main (first 8 outputs) were the I/O PWM pins and the AUX pins were the FMU PWM pins. I do not know if this convention was carried on.
I’m using the latest firmware of ArduRover : ArduPilot firmware : /Rover/latest/Pixhawk6C
The only wich is compatible with 6C…
For now I can’t get some signal on the connectors of the 6C ![]()
I just see that a red led was blinking : FMU B/E, but can’t find documention on this for now
EDIT : The Red light seem to indicate if the rover are armed or not (solid light when armed, flash when disarmed)
Did you try what I wrote above and set output 1 to RCin?
Yes, I try with a scop on all p6c output : nothing (FMU and I/O).
Scop is ok : I can get signal if I check directly on the RC receiver.
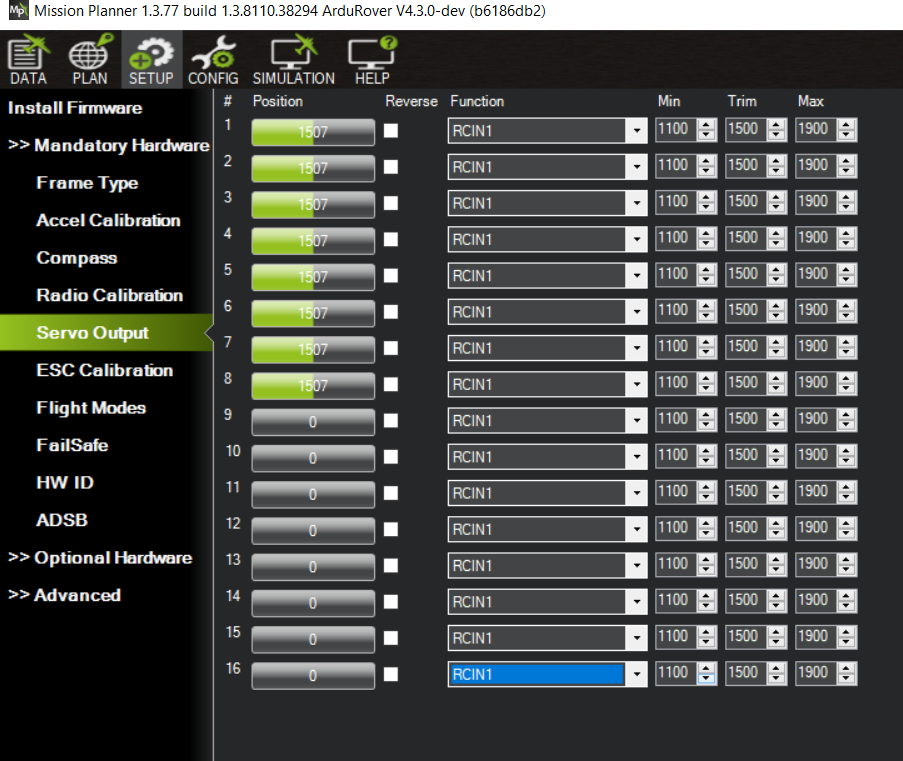
On Mission Planer I set, on “Servo Output” : #1 : RCIn1
There is a green bar showing for servo output 1?
Yes, bar “follow” the position of my radio command’s stick
But no output at all on the hardware output of P6C
This is really strange. Perhaps try to flash the firmware again. Or one of the other guys has an idea.
Try SERVO9_FUNCTION and see if the scope registers anything on the pin 1 outputs.
Sorry I’m not sure to understand what you want I Try.
Can you explain me please ?
Servo output 1-8 are the main or I/O outputs. Servo outputs 9-16 are the AUX or FMU outputs. Did you test all pins/outputs with the RCin setting?
Another thing, I can see green bar if I choose “Throttle”, but green bar don’t react to any sticks movements
Throttle is disabled until armed.
My issue can be due to the lack of GPS ?
I had this error :
25/08/2022 14:15:12 : EKF3 waiting for GPS config data
25/08/2022 14:15:12 : EKF3 waiting for GPS config data
25/08/2022 14:15:11 : GPS 2: detected as NMEA at 115200 baud
25/08/2022 14:15:02 : EKF3 waiting for GPS config data
25/08/2022 14:15:02 : EKF3 waiting for GPS config data
25/08/2022 14:14:58 : GPS 2: detected as NMEA at 115200 baud
25/08/2022 14:14:52 : EKF3 waiting for GPS config data
25/08/2022 14:14:52 : EKF3 waiting for GPS config data
25/08/2022 14:14:45 : GPS 2: detected as NMEA at 115200 baud
I’m using SimpleRTK2B (Ublox ZED F9P)
For the UART2 config (UART2 of GPS module to the Pixhawk GPS2 port), config is :
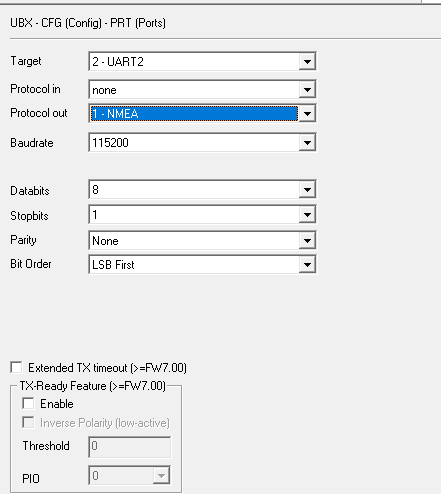
Is is ok ?