Hello, I got a problem, I have high vibration level in accx and etc, and drone not working fine, wondering, how peoples damping that one, I will add file you will se by your self, thanks in advance. 00000033.BIN | Files.fm.
-
Read section 1.1 of the How to methodically configure and tune any ArduCopter
-
Post pictures of the vehicle.
-
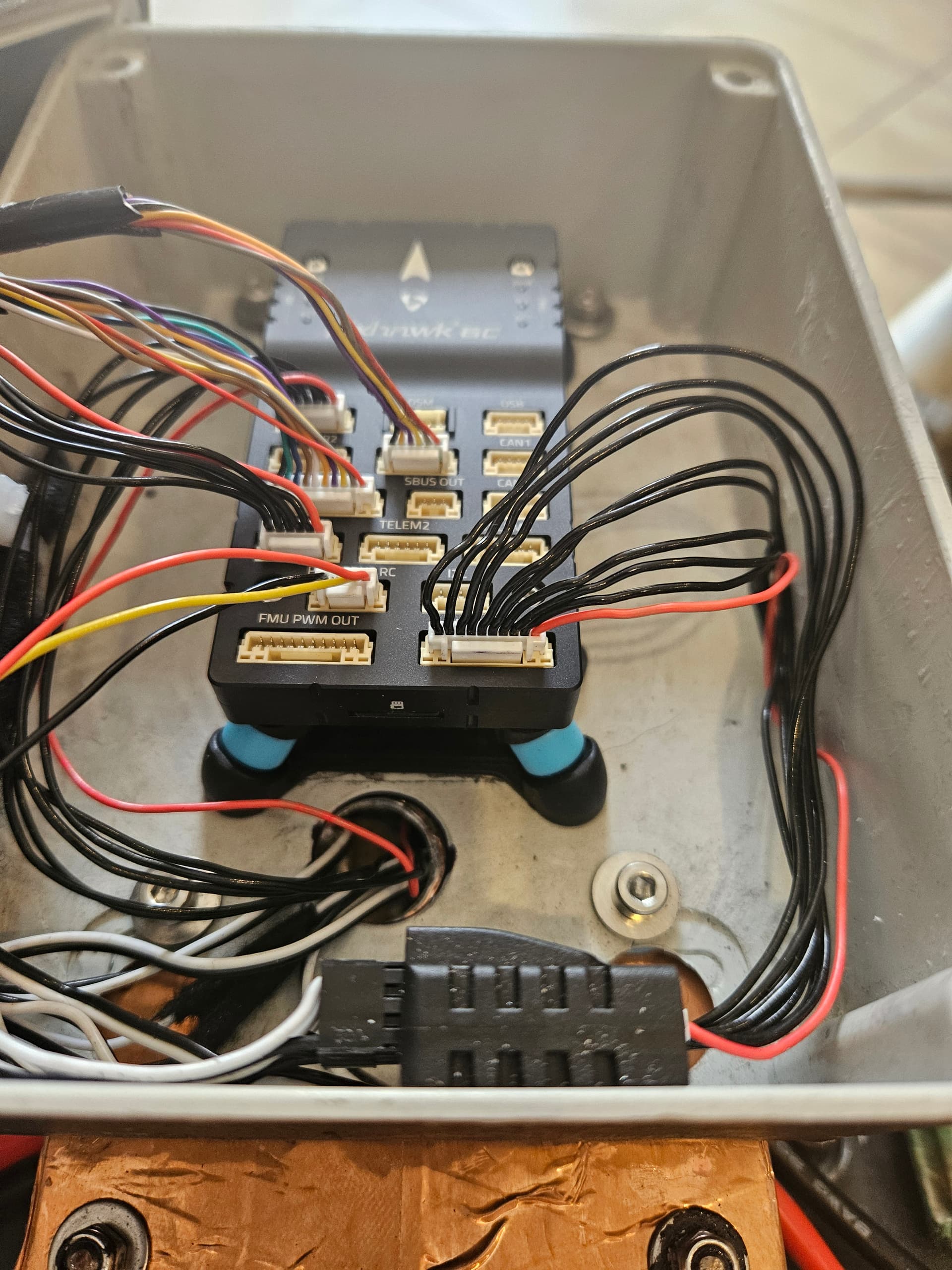
Post pictures of how the FC is mounted to the vehicle

There you go, already readed maybe 5 times. this is not first our copter, I understand the basics. we have been reading forum for whole few weeks. to tuning he doest react, the IMU is above +3 and -3 hugely. Z too. After notch filter it doesnt even takeoff normally, notch filter have 2 lines, smaller and bigger, now the first have huge amplitude, with notch vibrations even higher.
Considering the large amount of incorrectly set parameters on your other X11 build I will kindly ask you to follow the procedure:
- Update to ArduPilot Metodic Configurator 0.6.4 or newer.
- Use the X11Plus template and create a set of *.param files for this other vehicle
- Correct all information in the component editor, and update the parameter values and the reasons changed
- zip the files and post them here.