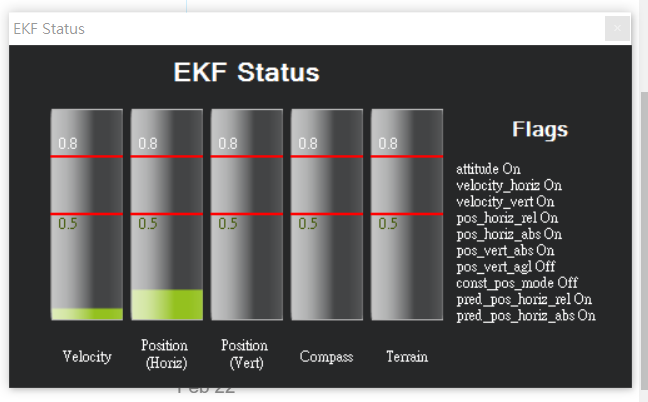
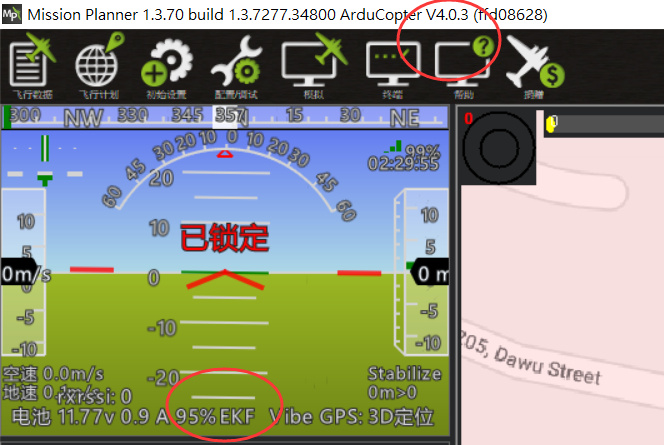
Hi, I have an intermittent problem on Pixhawk 4 Holybro, the drone gets slow responses and then I make a speed error and for the second time ask for the controls, but testing later it works normally without making any changes. The interesting thing is that my EKF is only enabled when the parameters of “velocity_horiz off” and “pos_horiz_abs off” are “on” after GPS enters 3D and even then after some time.
What I observed in the data of my OSD that my altitude, while the GPS is not in 3D, is 1 meter and when the GPS enters my altitude is 1010 meters, where I live the attitude is + - 1000 meters. Should not my barometer provide my altitude of about 1,000 meters? In earlier versions of Mission Planner I had no problem with EKF, today I’m using the latest version
What do you think ?
thanks
Same problem here. Someone help
I have the same issue, did anyone resolve it?
I resolved this replacing the power module, in my case the power mini brick for pixhawk cube. For any reason I don’t know an alteration of the voltage may produce EKF to behave wrong.
我解決這問題,我沒有改變任參數,等待GPS 品質轉好,這些數值警告都消除了
1 Like