Hi everyone.
I´m looking into connecting my FrSky archer RS with my Pixhawk 4 in order to have telemetry in my Taranis x9d + 2019. So far I know I have to connect the VCC and ground of the pixhawk to both the 5v in and ground of the receiver, the SBUS out of the receiver to the RX in of the Pixhawk, but I’m not sure if I should use the Sport or the inverted Sport of the receiver to the Tx out of the Pixhawk. Also I’m not sure if I should use the telemetry 2 port or the UART & I2C B port of the pixhawk.
Any suggestions?
Thanks
Update
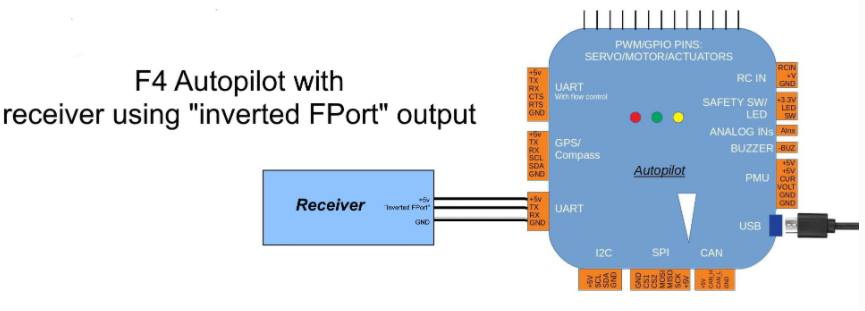
So I´m close to figuring out how to set up telemetry with my Taranis X9D + 2019 and Archer RS receiver with Pixhawk 4 and arducopter. I know i have to connect the inverted SPort from the receiver to the UART Tx pin as showed in this picture. Also I know I have to connect the Sbus out of the receiver to the Sbus in of the Pixhawk and configure the serialx_protocol = 10 and serialx_options = 4. Then configure Yaapu script in the Taranis.
I’m unsure if I have to use a MavlinkToPassthru converter to make it work.
Any ideas, suggestions or correction will be appreciated.
1 Like
did you succeed? I am trying to connect an FrSky Archer Receiver to a CUAV v5 nano. I don’t know if it belongs along the PWM pins or the SBUS/RSSI connector 
OR… you can check the diagram in the manual… I managed to bind the transmitter to the receiver, however I’m still working out how to link the receiver to the autopilot
Solved! Plug the Signal in the PWM header (RC channel) to the SBUS_OUT pin on the receiver.
Hi there,
What I did was connecting the SBUS out of the Archer to the SBUS in of the Pixhawk, I used the SPORT in of the archer connected to the TX out of the TELEMETRY2 UART of the Pixhawk, I didn’t have to use the inverted SPORT of the archer as the Pixhawk 4 is a F7 autopilot. In the configuration I used SERIALx_PROTOCOL=10 and SERIALx_OPTIONS=7 for the TELEMETRY 2 port. Also I used the 5v and Ground of the SBUS in of the Pixhawk to power the Archer.
Hope it helps