I just purchased a Pixhawk 2. I’m using Mission Planner. I have calibrated all the mandatory hardware, but I cant get my TX to spin the motors. If there is a good tutorial I would love to hear about it. Could it be that the ESC’s are not properly calibrated? The only way I’ve been able to get the motors running is in the motor test page of Mission Planner.
Also, I bought a Lidar Lite v3 (Garmin) range finder. I have it wired for I2C, but I don’t know how to turn it on or get data from it.
If anyone can help me out, I would really appreciate it!
Thanks to those who read my post.
Now I have a problem when the flight battery is connected. The HERE GPS turns off.
Did you check the prearm check?
You could be required it.
Also, you need to check esc calibration.
Second
Lidar lite 3 connect through pwm pin. It could be work.
Ok, now my rangefinder is offline.
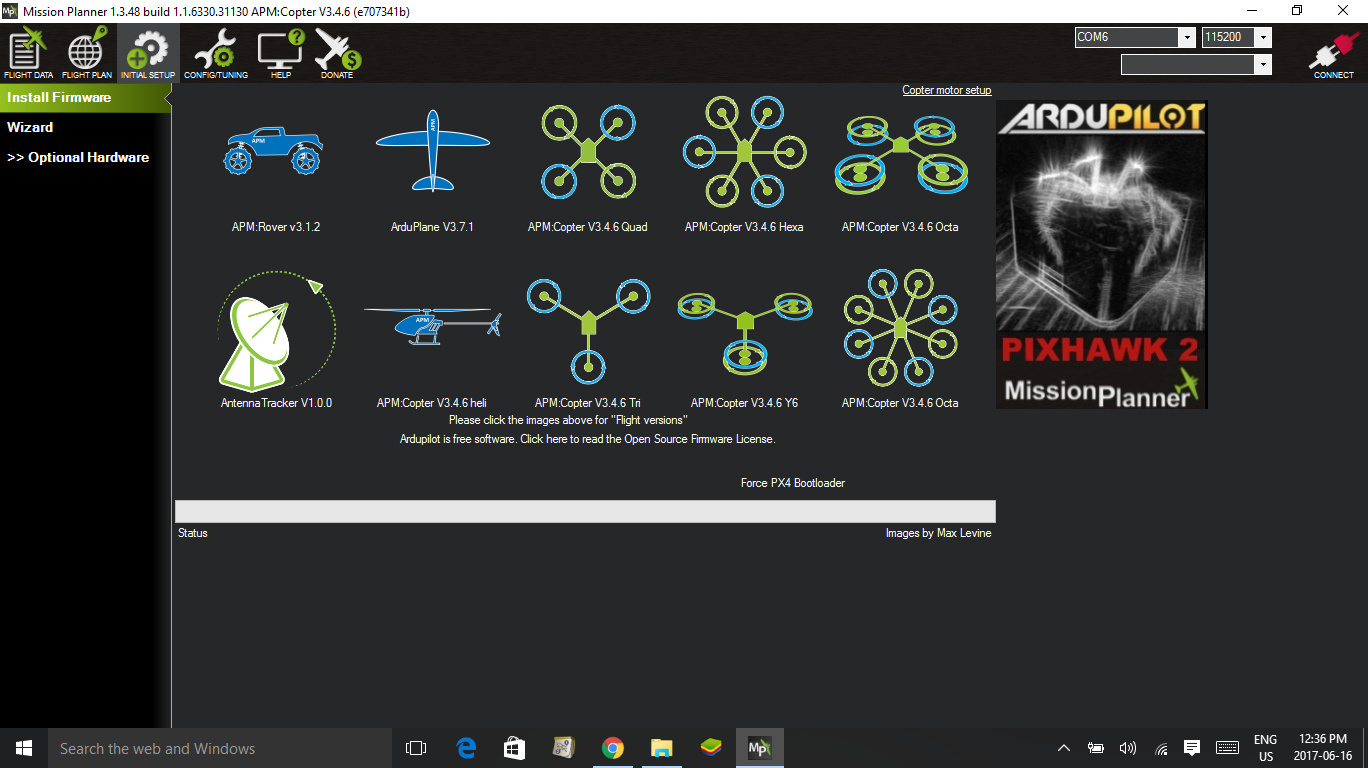
I’m using Mission Planner v1.3.48 and my copter is v3.4.6
i keep getting messages like “Set RNGFND_TYPE Failed” because the options only go to 12.
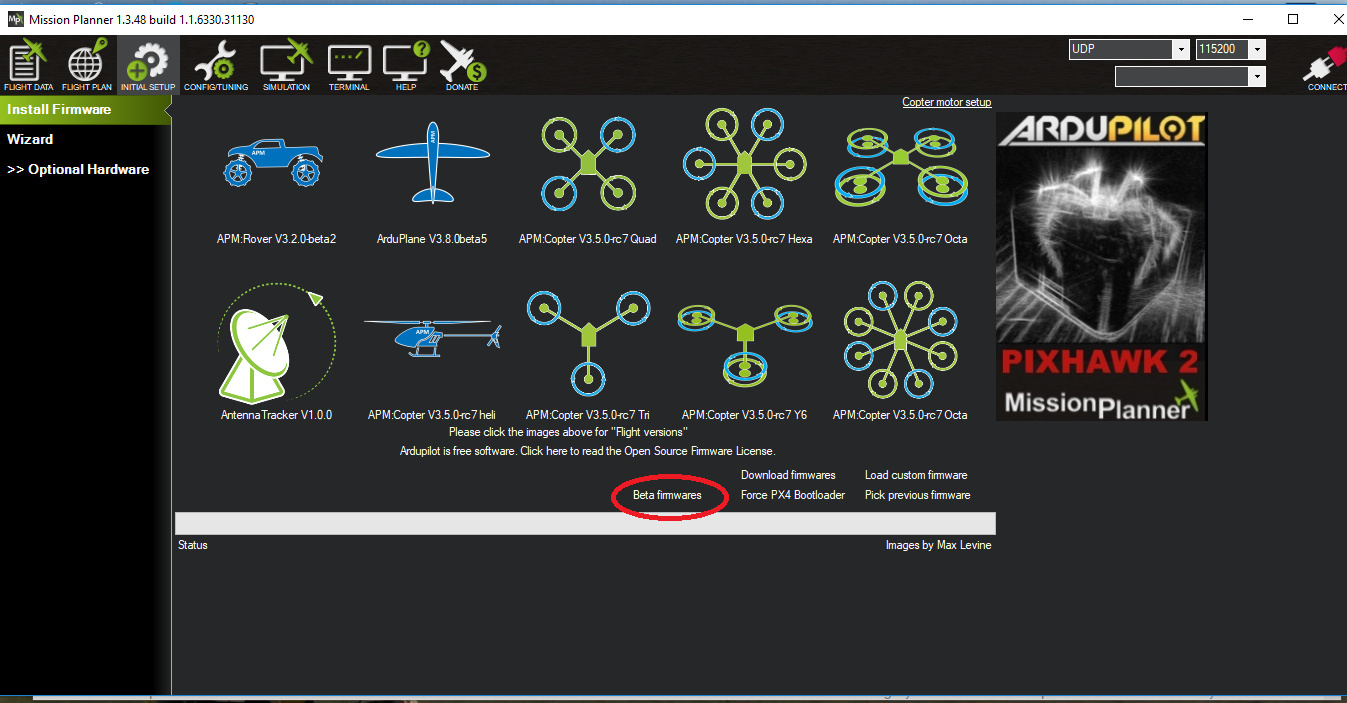
Is there a newer version of Mission Planner and/or copter version?
Ok,
I have the v3.5 downloaded from here: https://github.com/ArduPilot/ardupilot/releases/tag/Copter-3.5.0-rc7
but I cant find any tools to import it into MP. Do I need to place the v3.5 firmware in a folder in mission planner?
Also, the latest version of mission planner does not have extended parameters like the previous version.