Hi @hkk26
to entering ESC calibration :
1-turn on transmitter and put throttle stick at high position
2-connect battery to FC
3-remove battery
4-connect battery to FC again
5-now push safety button
6-after long beep sound put throttle stick to low position
7-ESC calibration is now finished
I used this config on a quad and works ok but not good !
But you must dont have ESC calibration problem
Do you calibrated your radio in mission planner ?
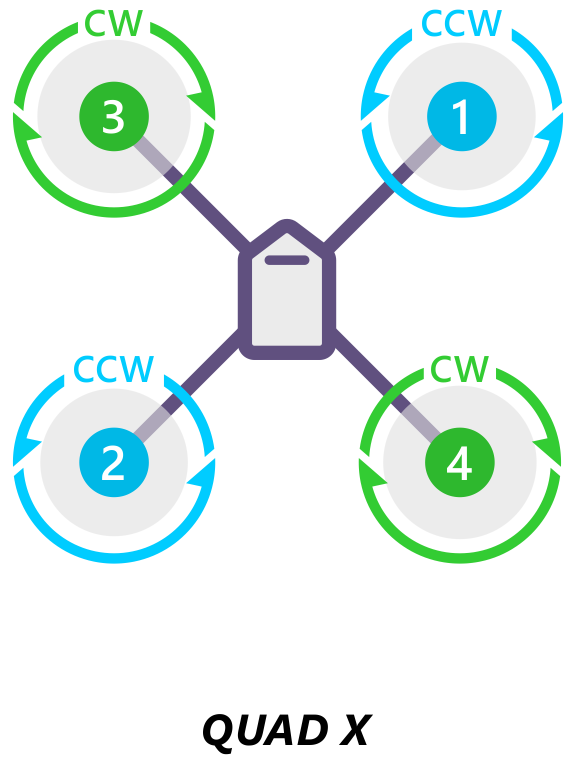
That’s the right motor order just double check you have them connected to the right outputs. use the Motor test function in Mission Planner to confirm this.
It’s foolish to power up a quad indoors like that with the props on.
And this is an example of what not to buy for a quadcopter build:
If you would have run the Motor Test you would have seen this problem before breaking parts on your craft.I suggest you fix this and then run the Motor test (props off obvioulsy) rather than take my word for it.
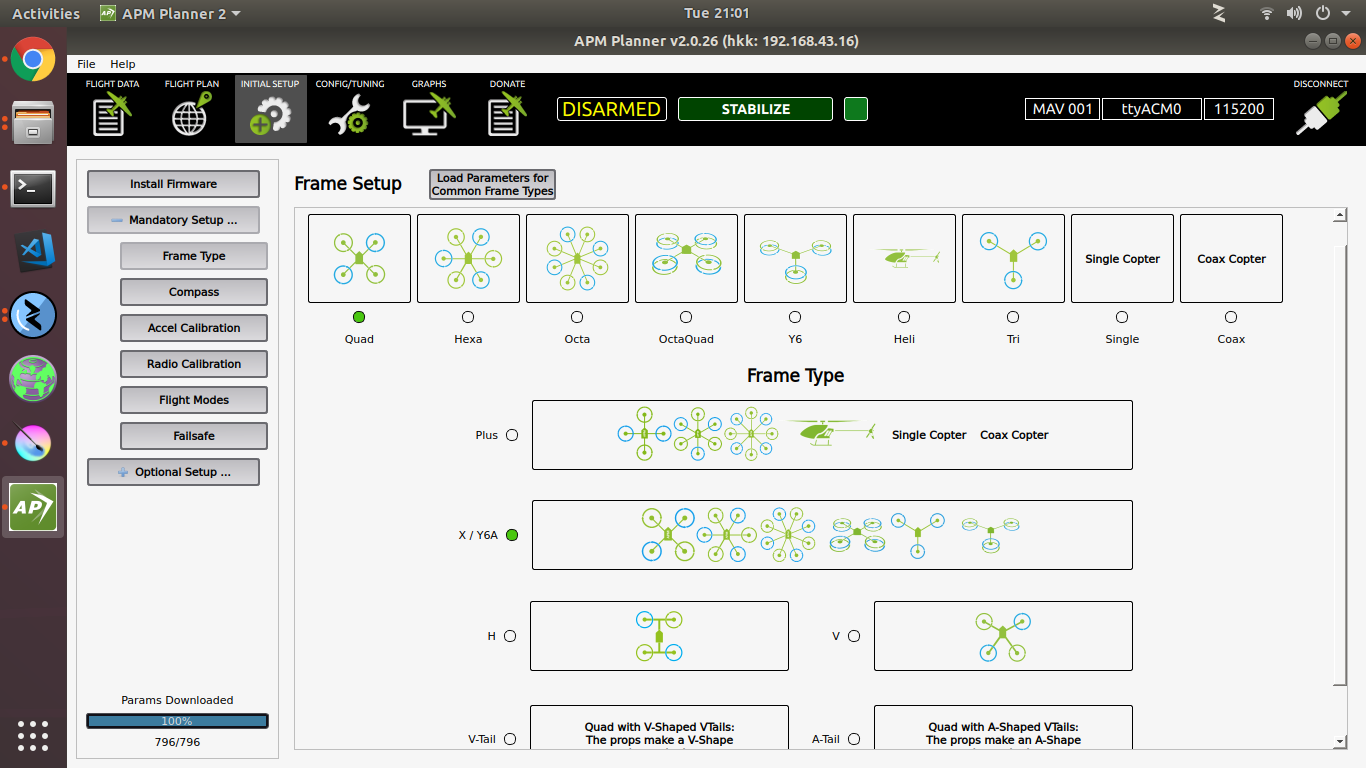
That’s not what I’m asking you to do. Can you run Mission Planner? Not APM Planner. Mission Planner Motor Test will confirm the actual order and rotation direction by spinning the motors slowly in an order.
You can run mission planner on ubuntu with mono or wine
Also now i seen your video with sound your esc calibration is true and your escs are now calibrated
If you cant use motor test with mission planner try to arm and disarm copter in stabilize mode and check motor rotation manually
Also i think you have problem with your radio control
In calibration mode your motors must react to throttle stick even at low position but in your video there is no any action while you rised it near center

{kind=link}