Hello everybody! I have a problem with my pixhawk …it seems to not spinning motors after it is ARMED…
I tried to calibrate all ESCs individually connecting servo lead of each one in the ch 3 from receiver…no error in mission planner…
Can anyone help me with some advices? Thank you!
Tell us what you’ve done up until now?
How did you get the pixhawk? What steps have you gone through up until now?
Hallo Ruben,
So…Before to choose Pixhawk 2.4.8 I used an old fashined APM 2.6 which worked very well.
I decide to change my autopilot with pixhawk 2.4.8.
So…I kept the same hardware (F650 quadcopter Ironman, the sensor kit came with my old APM 2.6, LDPower kit - electric motors - https://hobbyking.com/en_us/ldpower-m2810-720kv-brushless-multicopter-motor-cw.html , ESC (I think ESCs have no BEC) and propellers ).
I accomplished all the steps (radio calibration, campass cal, accelerometer cal) without no problem or any errors. Then I calibrated ESCs … it seems to be calibrated well …I used all methods (each one separattely using channel 3 from the receiver, the all in one method, using pixhawk also…it seems to be ok).
Then I armed th motors, armed without problems and when I move throttle up …nu response.
I tried to test each motor in mission planner and I received an error - ”Command was denied by the autopilot”.
I checked all connections … verify that signal wire to be placed ok…
I can t figured it out what happens?
PS: I have a feeling that it is my ESCs (30 A ), but I can t find a logical and technical explanation!

Thank you for your time!
Next step …I think I am gonna test another ESC but first I need to get one!
Hi Vidan,
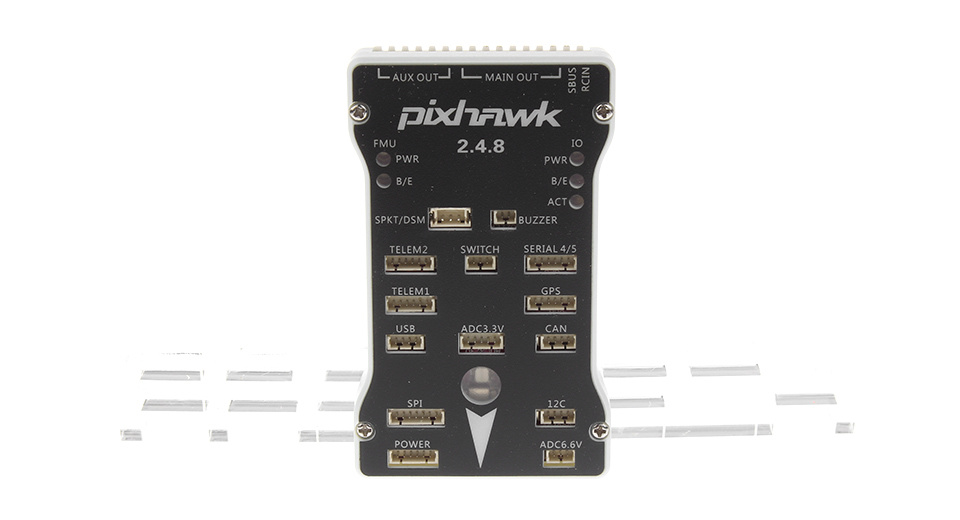
Thanks for the details. The interesting thing is, the pixhawk 2.4.8 is not very well known - There’s been a pixhawk 1, a pixhawk 2.1. So i guess you are refering to the firmware version that you’ve loaded on it. 2.4.8 isquite old.
Maybe make a photo of the pixhawk and post it, so we can identify it.
It would also be good if you provide a log or all the parameters that you have (you can save it to a file). The log is slightly better because that has the parameters in it too. This should work no different than what you did with your APM 2.6.
The Pixhawk 2.4.8 is a common Chinese clone.Very cheap and all over the place.I have three flying currently and they perform splendidly.
I agree photos of the rig would help as would a log.
Vidan,how exaclty did you do the all at once ESC calibration ? They should work fine with the Pixhawk.
Hallo Jagger,
All-in-one means:
I use a throttle calibration hub, I put in it all ESC three wire connectors and then I connected the hub to the channel 3 on my FriSky X8R receiver and than I performing the calibration.
PS: As a TX I use a Taranis X9D Plus.
https://www.youtube.com/watch?v=Hl-Q7RPOn18 - This is exacly how I tried to calibrate the ESCs through the Pixhawk autopilot!
For Ruben,
And soon I will try to download the data logs…maybe we can find there something that it can help us to decipher the mistery.
Thanks for helping me, guys!
1 Like
Thanks! I googled it after and see what it is. Looks nice!
This is where a photo of the rig could help.
You do have the SBUS out from the X8R to the RCIN on the Pixhawk ?
Try setting this LOG_DISARMED = 1 and then get a log from it.There must be a MAVlink message for the failure to arm.Have you checked the message tab under the HUD when attempting to arm ?