I made a pixhawk hexarotor drone with S550 frame and 980kv motors with 40A escs and I’m using 5000mah 3s battery.The problem I’ve been facing since the first flight my drone tries to pitch down at take off. BUT if I managed to give pitch up inputs and get in to the sky it will work fine. When I went through the parameters I saw that my pitching channel was reversed so I corrected it but the results is the same. I can clearly see that one side of my drone doesn’t get enough thrust.Please help me with this
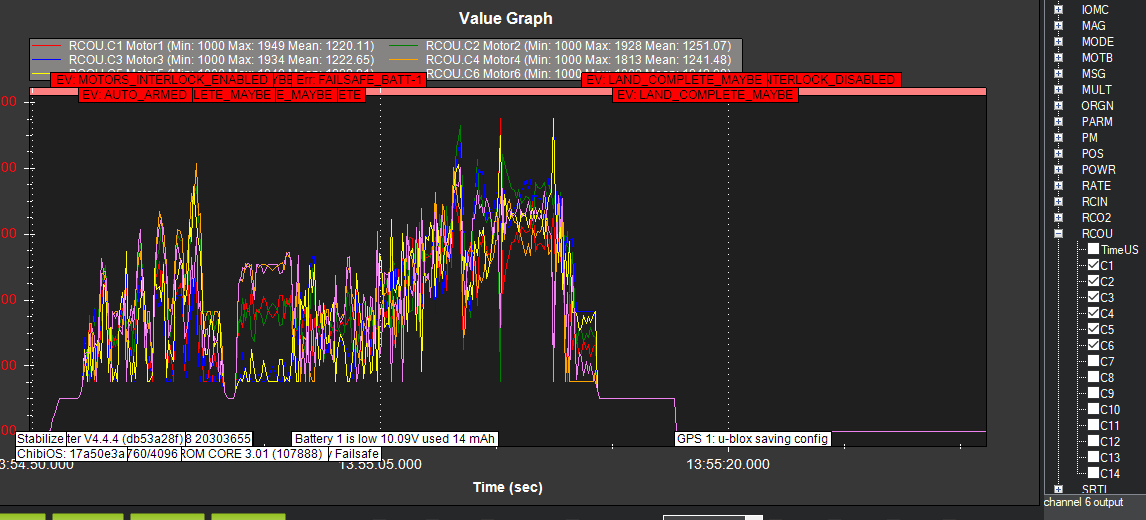
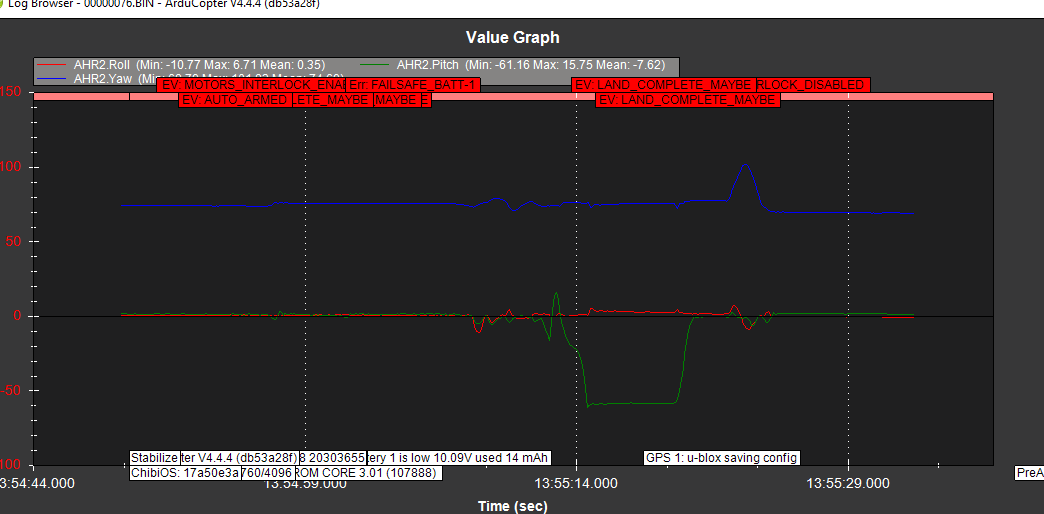
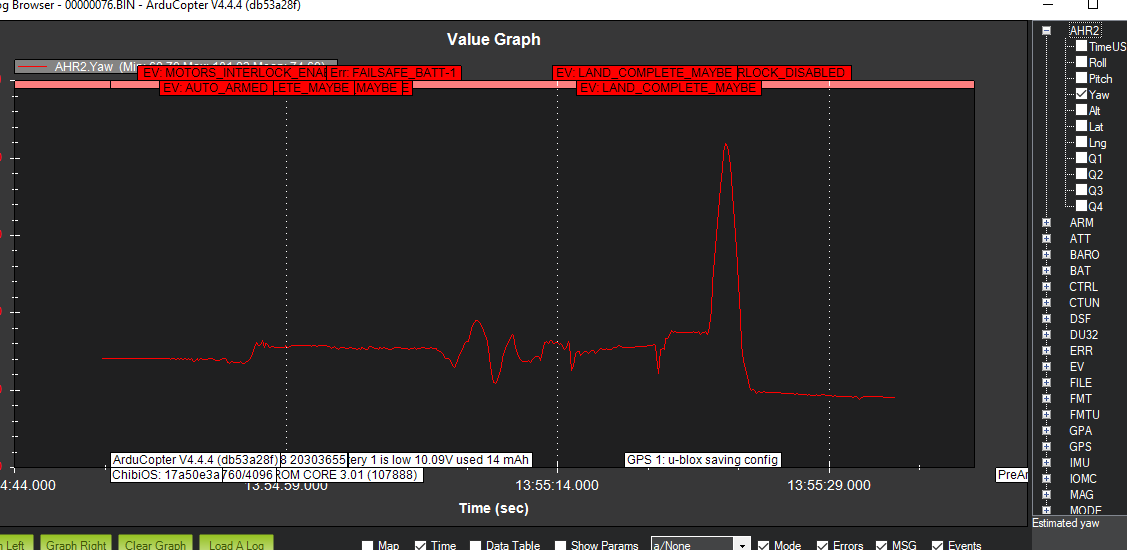
These are my Log analysis Graph.
Ca anyone say is there anythingwrong in this charts and is there any way to solve this. My firmware is pixhawk1 4.4.4, and please let me know how to hard reset the pixhawk beacuse maybe it will work. This is my first build so I do not have much knowledge on Pixhawk or the mission planner.
@S_2006_UAV ,
this question gives much more information as your other thread, but I think in this case the complete LOG:BIN file and probably the .PARAM file are much more helpful as these pictures
In any case provide a link to the bin log when requesting help. Anyone that will review this will ignore posted screen shots of graphs and graph them for themselves and/or review the parameter file.
Nothing much to see. Default parameters. Perform the usual calibrations again:
Radio with all trims centered. And don’t move the trims for any reason.
Accelerometer calibration.
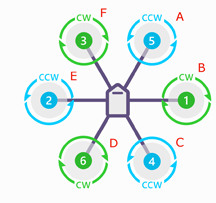
Check the Motor Order and Direction with Mission Planners Motor Test:
The instructions are obvious but these should turn when you hit the A-F buttons.