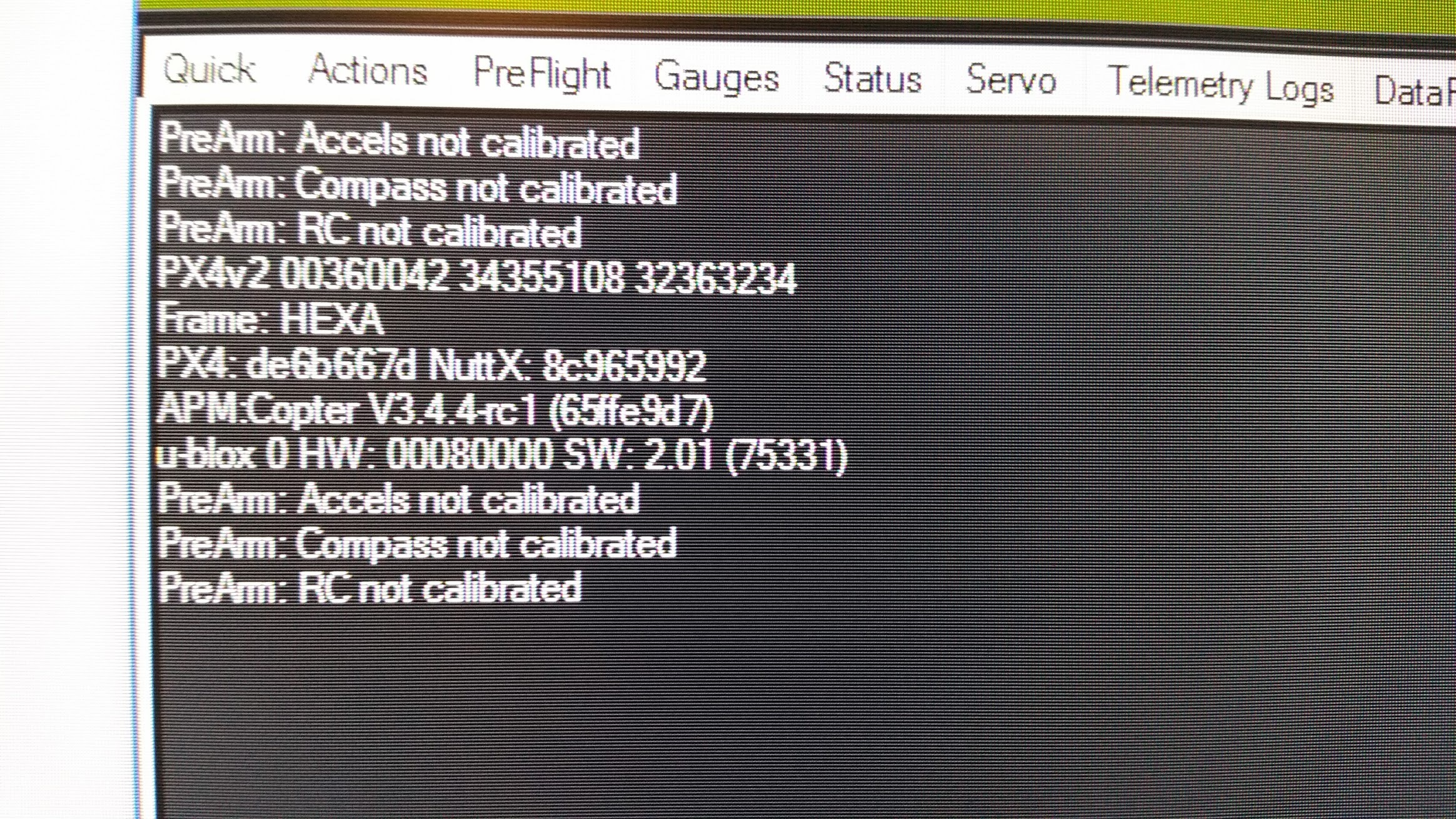
It definitely looks like a PH and the messages indicate it is a PH so my assumption is wrong.
I have seen a similar throttle problem in another thread, but I can’t find it at present.
If you turn on “pre-arm logging” in parameters you can get a log file to post which might help in finding out whats going on.
Wasn’t there an issue some time back about memory space on some clone Pixhawks? Perhaps that is an issue in this case. This is just a WAG. I haven’t heard of this since but I thought I would throw it out there.
After few more tests I see that in firmware v3.3.3 throttle working all way no problem but still getting crashes if trying right stick in some positions so not able to use it at all
I have also noticed that every firmware above 3.2.1 giving me a motor/esc beeping before arming in sync like every second or so on all motors but with the time 20-30 seconds is not in sync any more, when armed beeps gone!
with firmware 3.2.1 there is no strange motors beeping!
I do recall a memory issue with some boards as @rustutzman mentioned.
But @dkemxr says he has these and they work.
So you either have
a) 2 boards that are incompatible/faulty
or
b) an issue with loading firmware.
Option b) can be checked out by doing a couple of things
1 - make sure you have a good USB cable as some are a bit light on wire diameter and cause voltage drops amongst other issues. So use the best quality USB cable you have and connect it directly to your computer and not through a hub.
2 - do a clean install after an erase. Install plane or rover and then re-install copter which will erase your board and give the leanest install.
For my own information can elaborate on the “CRASH” you say you experienced.
The 2.4.8’s that I have use the Rev 3 processor with 2MB of flash like the last 2.4.6’s shipped from 3DR. But there are definitely different version of these 2.4.8 clones because some have gotten them with a 5607 baro device instead of the proper 5611. So maybe there are other inferior components. I have to say for what these units cost (~$60) they are a real bargain. I have 2 of them and one Pixhawk 2.4.6 and I don’t see a difference.
I have tried already fresh install with different, cable, different usb ports 2.0 and 3.0 also different computer all the same !
“crash” I am getting when in the middle of tests mission planner say “CRASH: DISARMING” and disarming all the motors, it happens only with firmware above 3.2.1 especially when I start to do some strange movements with the right stick.
also checked! when I do radio calibration the end points in all the firmware versions are exactly the same so the top throttle going up to 2006
need some advice - do you think it could be some strange incompatibility issue with my esc or motors ? even 3.2.1 was ok ? have nothing else to test right now
The only thing I can think of suggesting now is to check with your supplier on what hardware is on the boards to see what might be causing this incompatibility.
Not much help I know.
Or maybe go over the board and compare it with the standard Pixhawk circuit diagrams and see if you spot any difference.
just little update
I have measured the voltage pwm output from pixhawk with standard multimeter
during esc calibration the top level is over 330.0 mV but under normal arming the max is 250.0 mV what is reached at the half way of the throttle stick and won’t move any bit more even if you go with the throttle full up, so I think I can exclude esc/motor incompatibility issues and concentrate on pixhawk
Is the esc calibration method changed a bit from 3.3.3 up ?
I have feeling like the upper range of my throttle is not registered correctly as there is only one beep at the top, there is few beeps at the low position so it looks normal, but the top beeping much more with 3.2.1
actually should I calibrate the esc from firmware to firmware or just once ?
I’ve not yet tried any FW below 3.3.3. One thread I found (can’t find the link) had a problem with auto calibration that was fixed by changing the PDB. I can’t see how that would work, but that’s my next step. The Pix is buried within the frame so I can’t easily see if it says 2.4.8 on it, but when I swap over the PDB I’ll see what it says.
I have just tested single esc/motor connected directly to battery and at the same time pixhawk powered through usb port only so no pdb used at all, sadly no difference
I’m sceptical it will work too, but I’m running out of options. There seems to be no good reason why it doesn’t work and I can’t believe we’re the only people to have this problem, yet there seems to be no solution.
I have two identical pixhawk units (2.4.8) same ebay seller, today I thinking to order another one from different seller but really afraid to finish with third unusable module! do you have any other pixhawk around you to check if you can flash it with 3.4.3 or 3.4.4 and check it with rest of your stuff ? I have it in the air with 3.2.1 no problems but wish to upgrade to make it work with flightdeck and few other things.
I couldn’t resist to order another pixhawk, different seller on ebay, v2.4.6 (theoretically as no version number on case, going to open it later)
just arrived!
esc/motor beeping every second still with me until safety switch on so nothing new here
throttle - even stranger than the last time, at the start throttle stick working all the way up/down no problems but when I let it go around the middle for a short while (lets say 10 sec) I can hear the motors slowly increasing speed to the max so when they are at max and I move the stick any higher there is no impact on the motors at all but when I lower the stick down to about minimum motors speed decreasing and I am getting the full scale of control again even with the upper half of the stick
( I am starting to think it could be some kind of new feature detecting pixhawk is still on the ground and not flying anywhere but can’t really understand how this is suppose to work)
esc calibration exactly same as with my other two so seems to be ok i believe
full throttle up/ power on/ rgb led/ power off/ power on/ safety switch/ yellow led? beep/ throttle down/ few more beeps/ throttle up-down full scale of control of motor speed
If the motors are on and when I try to move the right stick to left down corner or right top corner motors switching off instantly and I am getting info from mission planner as (CRASH DISARMING) same as with my two v2.4.8 but it never happened to me with v3.2.1 firmware so I don’t really know if this is normal with new firmware when on the ground testing
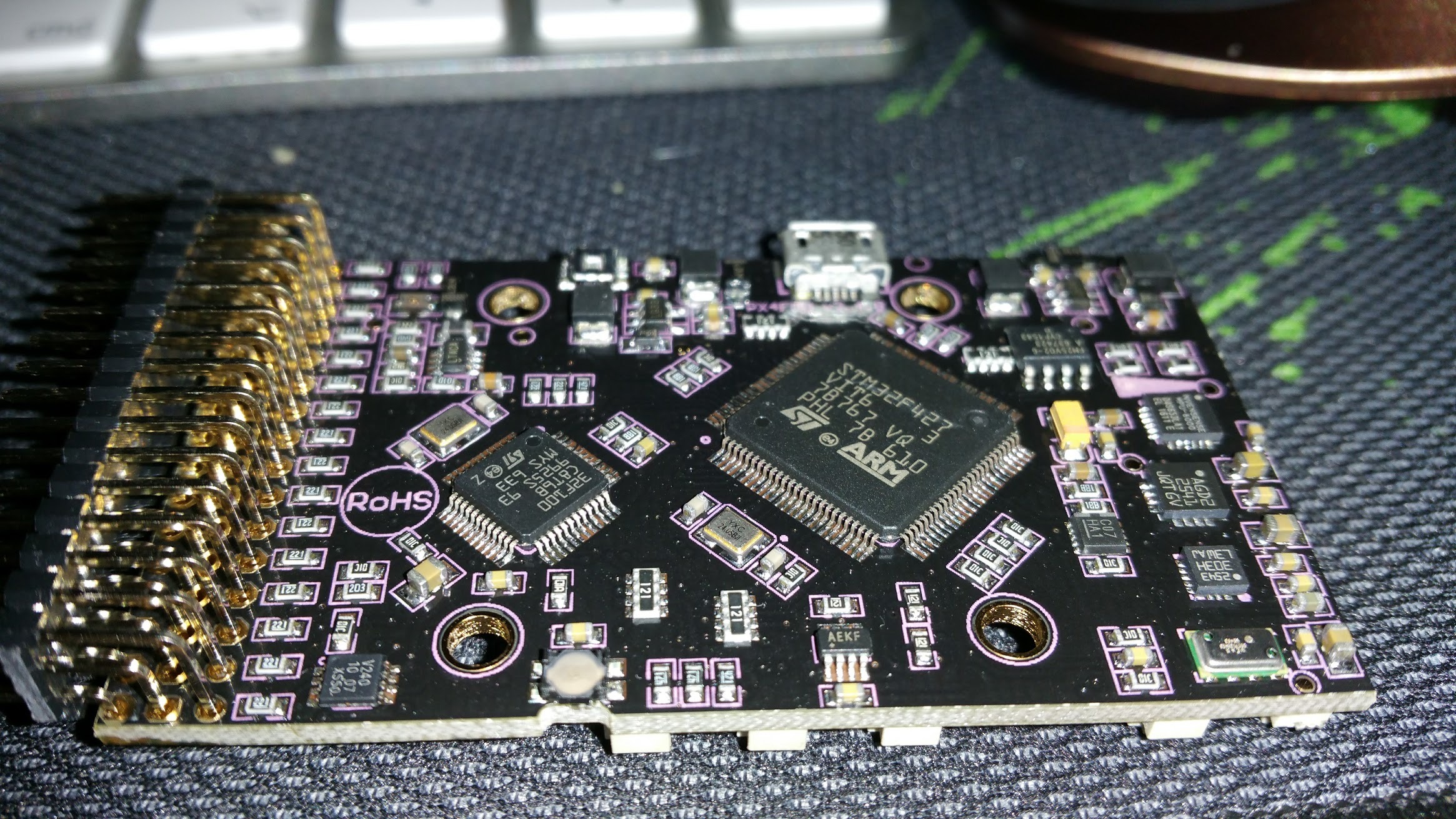
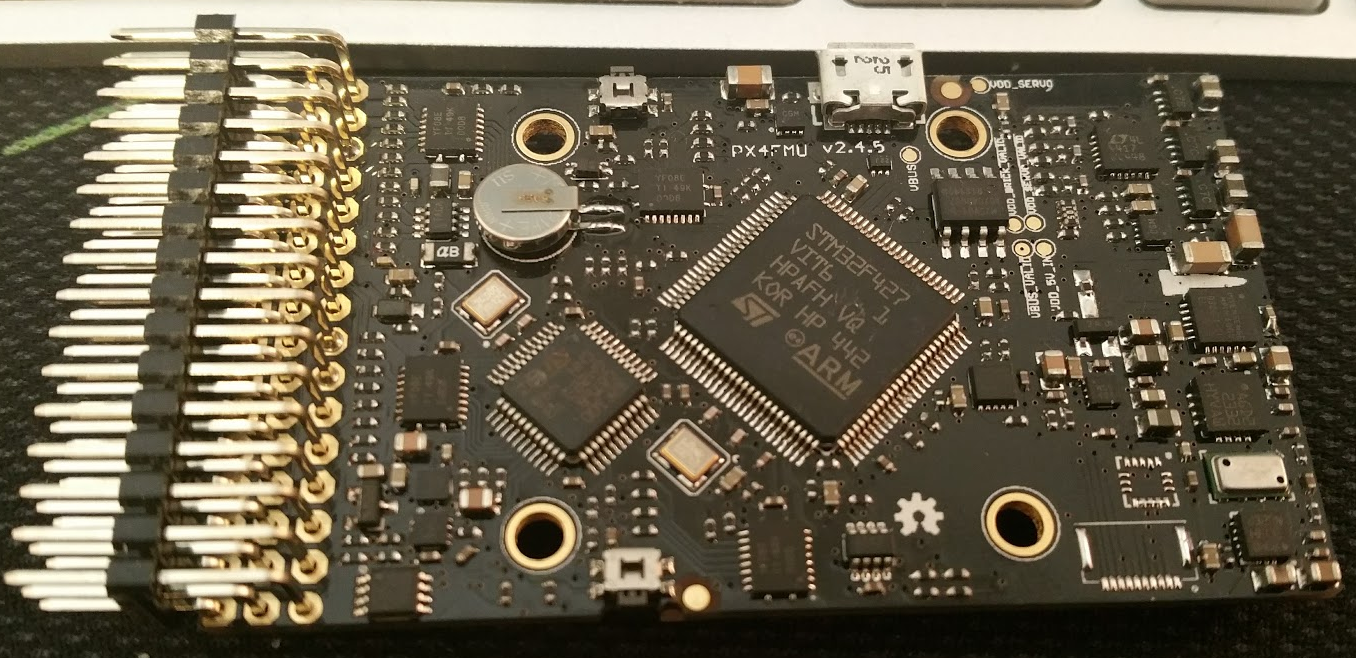
The new one looks completely different - there is a battery on board ?
also two microswitches on both sides, I can’t find what they are for when I press any of them the small red led light come on at the same side as switch, firmware persisting on the board
I’ve added a new PDB but I’m not noticing any difference at all. However, in my haste to calibrate the ESCs, I forgot to power on/power off, so the sequence was THR max > power on > yellow LED > throttle down > musical beeps and then the motors spin up and down correctly with the throttle, but no change when restarted and running through the Pix.
Running calibration in auto and semi auto is exactly the same as before.
I’m beginning to think that somewhere in the software is a change that’s not compatible with the current batch of clone boards out there and the Chinese haven’t updated them to work with the new firmware. My Pix is probably about a year old, but I’ve only just started on the build so I’ve no idea whether this has been an issue from the start.
I buy clones when times are tight and genuine when I’m more flush, but I’m loath to spend three times as much as a clone on a genuine Pix. I can’t find anywhere in the UK that sells the boards without the power module, buzzer, button etc. I’ve got all those bits in abundance and I’d rather save a few quid and not buy any more.
This has now turned into a bit of a rant so I’ll stop here
The only thing is really strange that there is only two of us, I got new different unit and still same problem!
I starting to think the problem is somewhere else!
I have taranis x9e and I see you also have taranis
I have afro 30 opto with afro_nfet firmware - I have noticed when I uploaded a blheli to them they are going crazy as hell but no (1s) beeping , anyway I am back now to afro_nfet.hex for tests
I have also Quanum MT4010 475KV I don’t know them at all! never used with anything else!
what is rest of your setup ?
thanks