my pixhawk 2.4.8 oscillates in altitude up and down, no matter what throttle input i give it, also is there a better way to share logs than screen shots? any ideas on what could be causing this?
Post a link to the .bin flight log hosted on a cloud site.
You are using ancient firmware. Update to latest Stable with the Pixhawk1 firmware. Easiest way is to download the .apj file from here Pixhawk1
After that make sure that EK3 is enabled and EK2 is disabled.
I would start start over from default, Configure the Initial Tuning Parameters and then continue with general tuning.
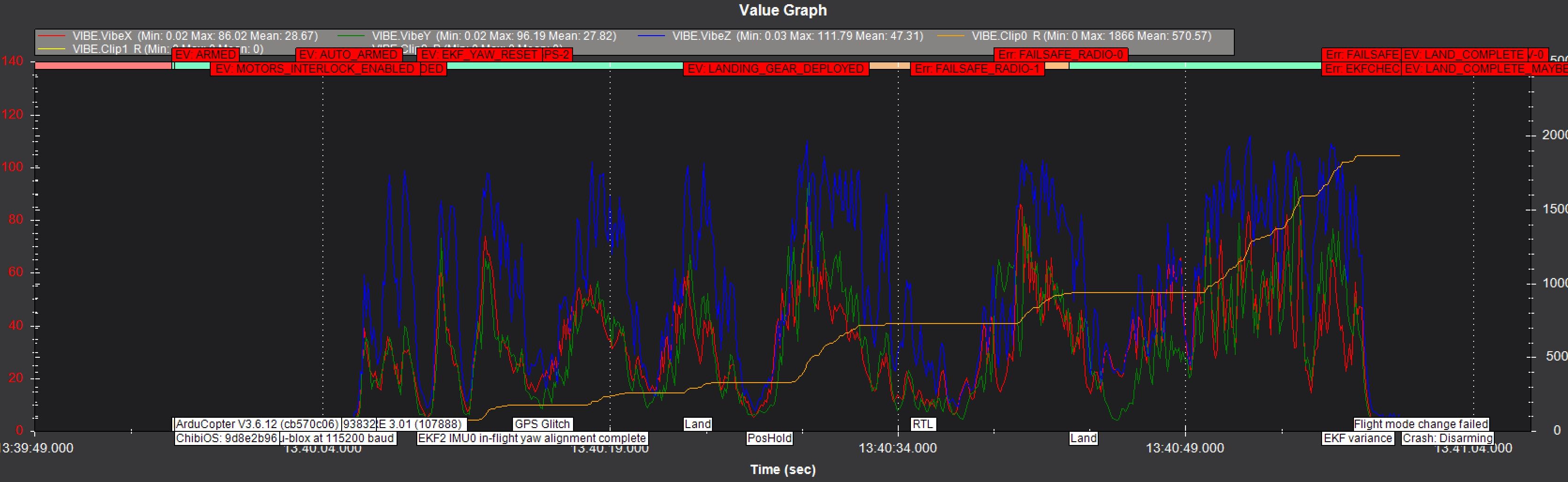
But to answer your question directly your vibe levels are off the charts with 1000s of clipping events.
On top of that this craft is underpowered/overweight by a large margin and it has a mechanical yaw bias:
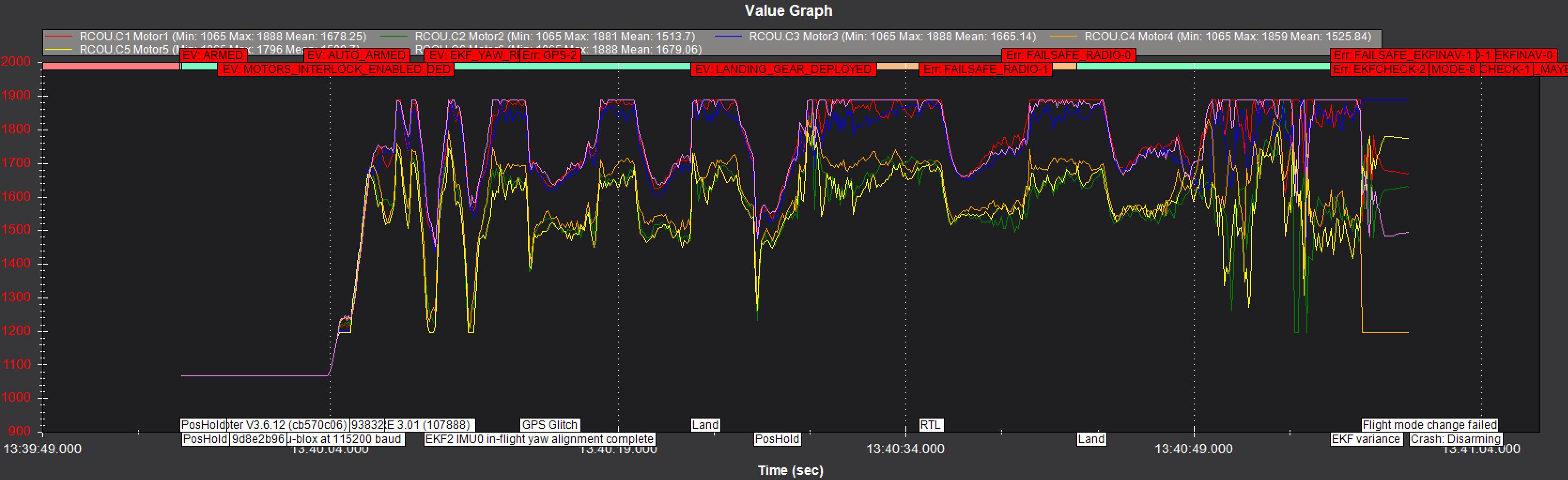
Outputs maxed out and CW motor demand higher than CCW.
Also looks like you need to calibrate the battery monitor. Porper battery voltage is important for scaling. yours appear to be way off if it’s a 6S battery.
And it goes w/o saying that the tune is terrible.
Not much right with this craft.
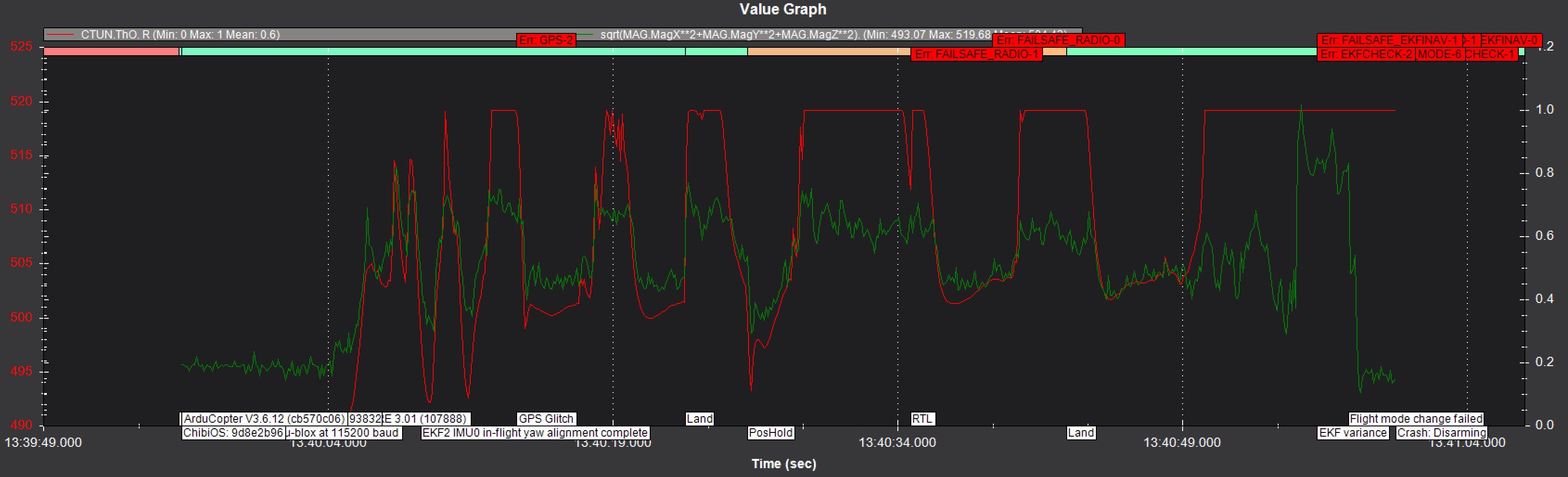
And there is a lot of interference on the compass:
1 Like
Ive ordered a vibration damper for the pixhawk already l. Also i thought that the 2.4.8 didnt support newer firmware which is why im using the old firmware.
Not true. If you happen to have a Radiolink version throw it in the trash and get another Flight Controller.
It needs to loose significant weight also.
It cant really lose much weight. More power is probably gonna be a better option. I still need to add the gimbal and a pi and transmitter. How can i tell if its radiolink?
Says it right on the case. If it doesn’t it’s just another generic 2.4.8. You could do better than that.
Well mines not a radiolink at least. Im trying to not spend any more money on this thing. Ill look for a used controller and motors.
Purchase a subscription to eCalc. The few $ it cost will save you from building another multirotor with insufficient thrust/weight. Plug in the components and take-off-weight and if the Motor@Hover Throttle (linear) is 50% or less you are good.
it already hovers at around 50% throttle. Also how do i fix the cw ccw discrepancy?
Clearly not. What are the components on this craft? A photo would be interesting.
This is a mechanical yaw bias usually caused by motor mounts or arms twisted. Or poor quality props.
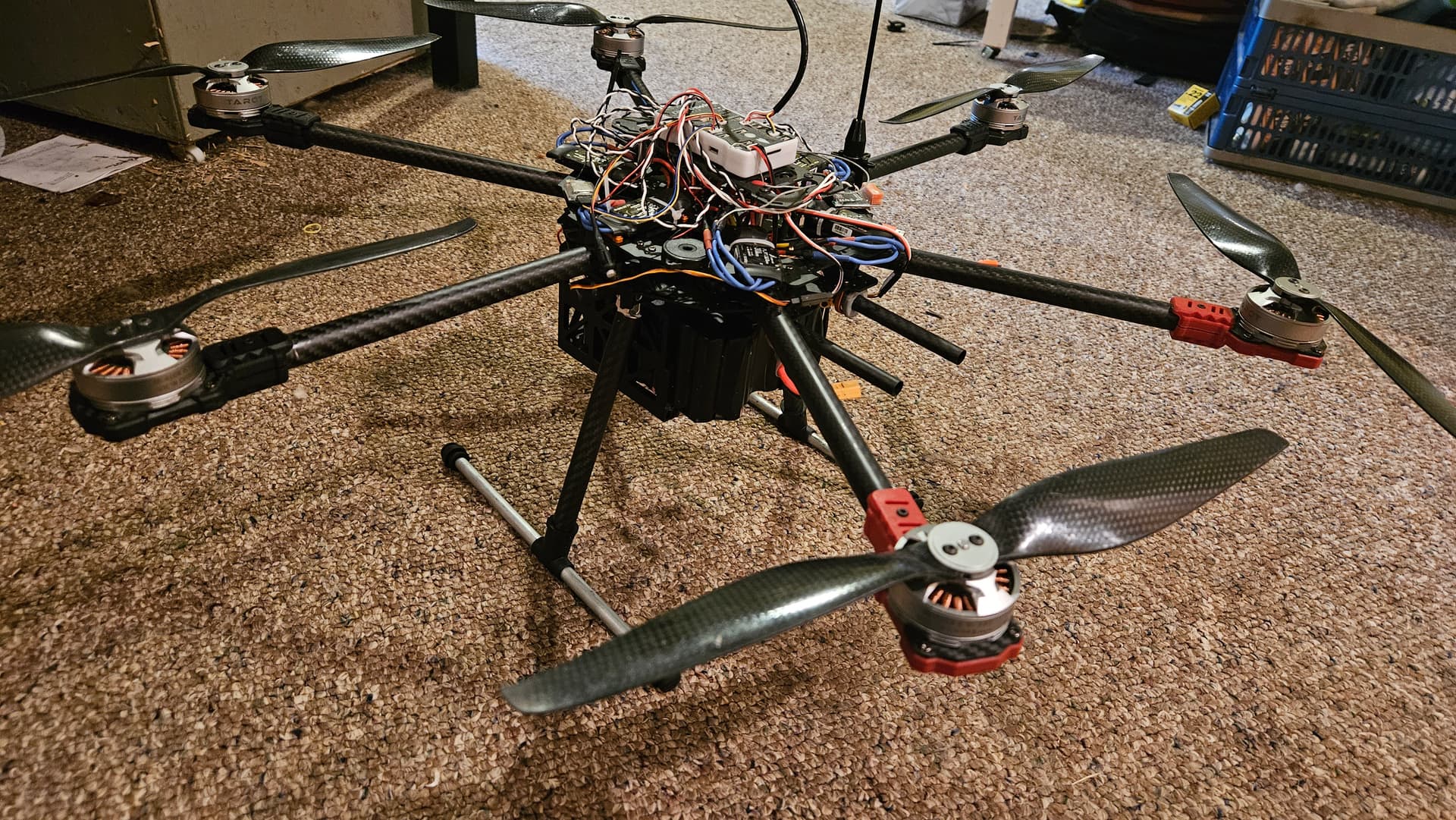
Pixhawk 2.4.8
Tarot 690s frame
Tarot 4108 380kv motors.
6s7p lion battery with 30q 18650 cells.
13 inch props
30a hobby wing escs.
OK, so the Yaw bias will almost certainly be because those motor mounts are not levelling the motors. Common problem on those frames and others like it. It doesn’t take much, care must be taken to get them right and secure.
What is the take-off-weight?
That’s the trouble with those earlier Tarot folding frames - there’s no room in between the base plates to mount anything, and it all ends up in mess at the top and hanging off the sides. You also end up disabling the folding mechanism by putting cable ties around the arms and their clips.
Tidy up all the wiring too. It all needs to be secured or will be contributing to vibrations. But ensure the wires are not pulled tight where they plug into the flight controller.
Secure the GPS wire to the mast and to the base plate before it plugs into the flight controller - extend the wiring if you have to.
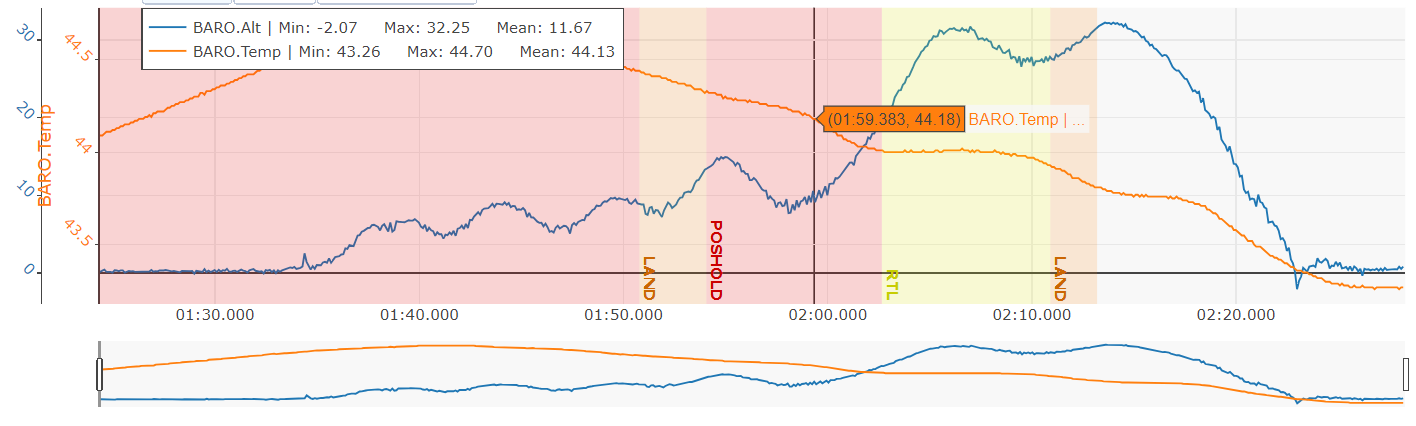
The copter benefit from a cover over the flight controller and wiring too, to minimise prop wash and poor barometer readings.
I couldnt find those motors in ecalc, but they seem very close to the old Tarot 4008/380kv.
Your battery should probably weight about 2kg.
You total takeoff weight could be up around 4kg at most.
You should have just a fraction below 2:1 thrust to weight ratio, which is OK.
So if throttle is going to 50% or more then something is wrong, or the takeoff weight is much higher for some reason.
I designed it to have a 2:1 twr. But i added aluminum landing gear cause i broke the cf ones.
It has nothing close to that. It’s pointless to advance w/o addressing this.
i believe this shows the drone ascending at around 35% throttle?
also i fixed the vibration issue. now im having a voltage drop problem as shown in the data, im charging the batt now to see if its just that. i also upgraded the firmware like you said and i have a cover for the electronics, to shield the barometer.
This shows an overweight/underpowered craft as stated.
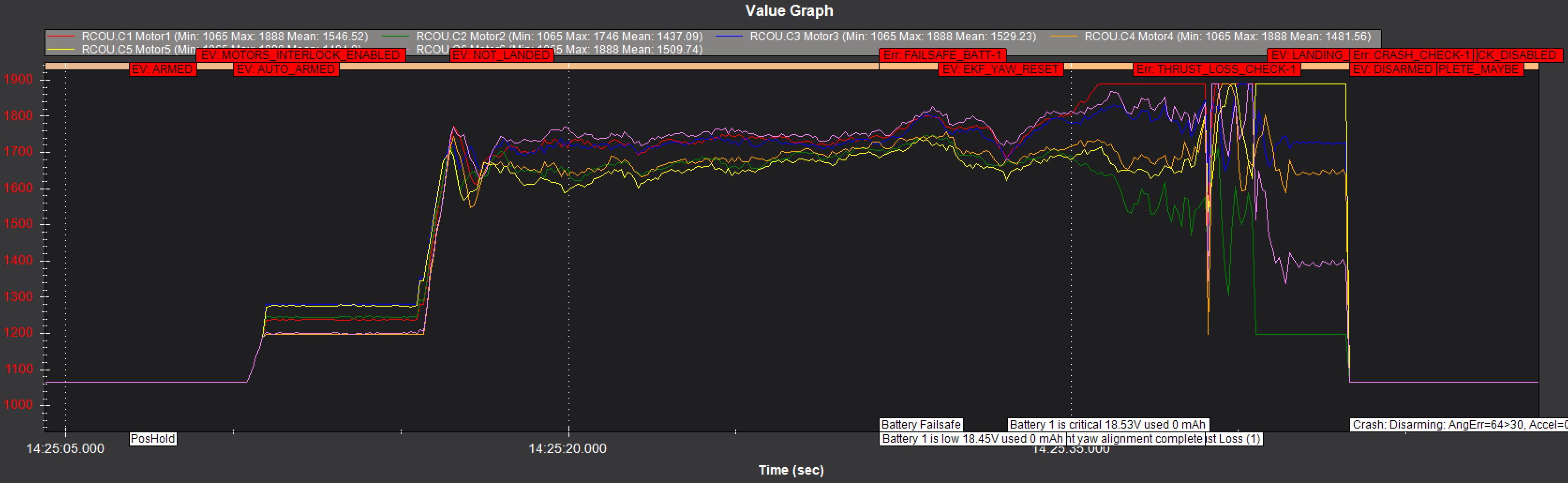
Average Motor ouput at Hover is ~1750µs. It should be ~1500µs or less.
Some motors are close to max and there are thrust loss errors.
You are spinning your wheels until you address the thrust/weight issue.
That battery is sagging quickly and you should have current logging configured.
Well i weighed it. Its at 4.6 kilos. Each motor has a stated thrust of 1.6kg i should have a twr of over 2 rn. Could there be a problem with the escs? I did the math when i designed this drone.