So yesterday was a big day for me. I took my dad to the field to show him the wonders of an autonomous drone, but my quad with pixhawk 2.1 on it CRASHED while it was doing auto take off.
This was the very first time something happened to this quad, i have done some simple missions on it, tried some failsafe such as battery and radio failsafe and the system performed remarkably but not yesterday.
I was controlling it via TOWER app so I haven’t yet figured out the reason of failure yet. I came home downloaded log files from the pixhawk (for the very first time).
I did an auto analysis and manual log review but I couldn’t actually figure out the exact problem of the crash.
I think the GPS messed up because while reviewing the log I observed there were 19 satalites and another moment it went 0, also mag feild interference was under the limit and suddenly it peaked to 99.99
I am attaching log file and automatic report, please if someone could tell what caused the crash and preferably what can I do to avoid it.
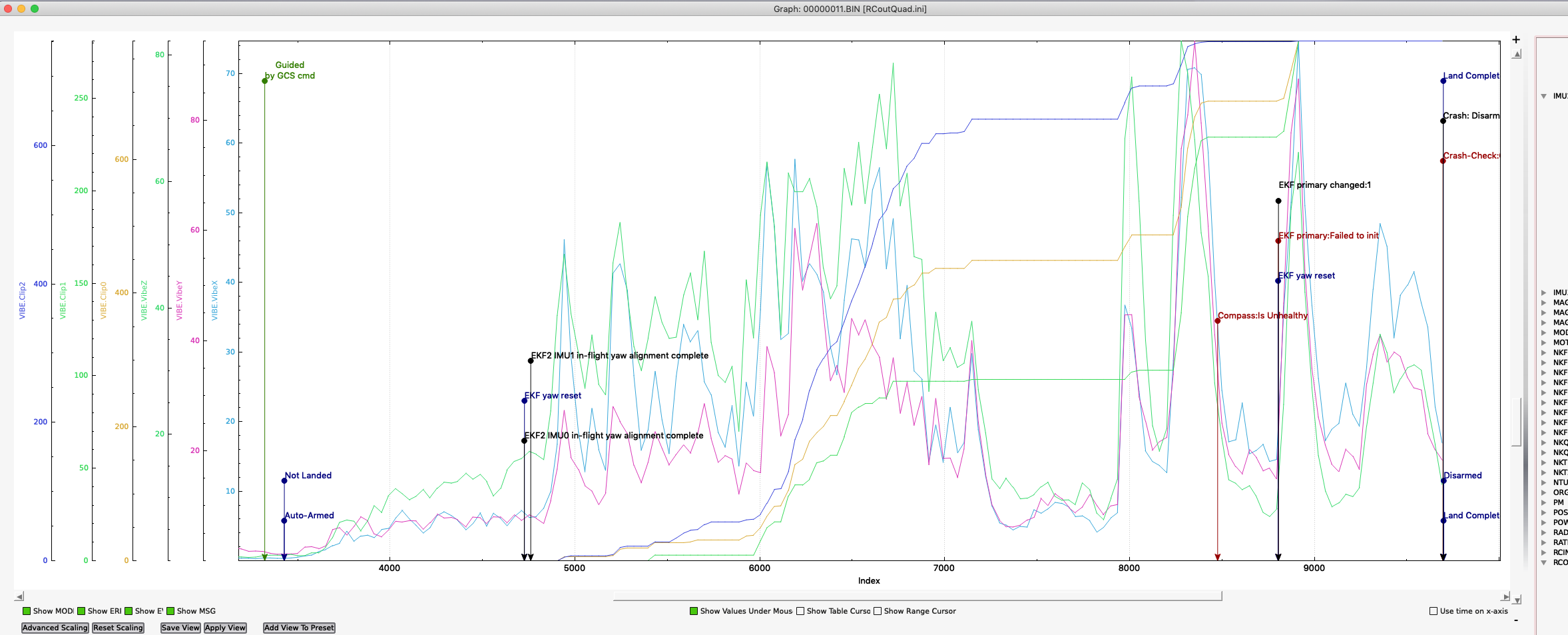
The GPS definitely dropped out. Your vibrations levels are very high with clipping on 3 axis. Maybe there was intermittent connection loss to the module as a result affecting the compass also.
Sir thank you so much for your reply could you please explain a bit more , I want to make sure that no such mistake happens in future.
Could you please tell how did you found that vibration levels were high (where in log file?)
And how did you knew that there might be connection loss.
As I am a beginner, I am asking these silly questions, hope you understand.
You can also graph functions of the GPS (Sats, HDOP, Status, etc.) by selecting them from the menu on the right side. It’s just a guess that there was a connection loss, I’m not sure why you lost GPS.
PH 2 with such heavy vibrations?! oh man… start with balancing your props. Let’s assume your motors are balanced so it has to be the props who are rocking like hell…
There are so many anomalies with this log.
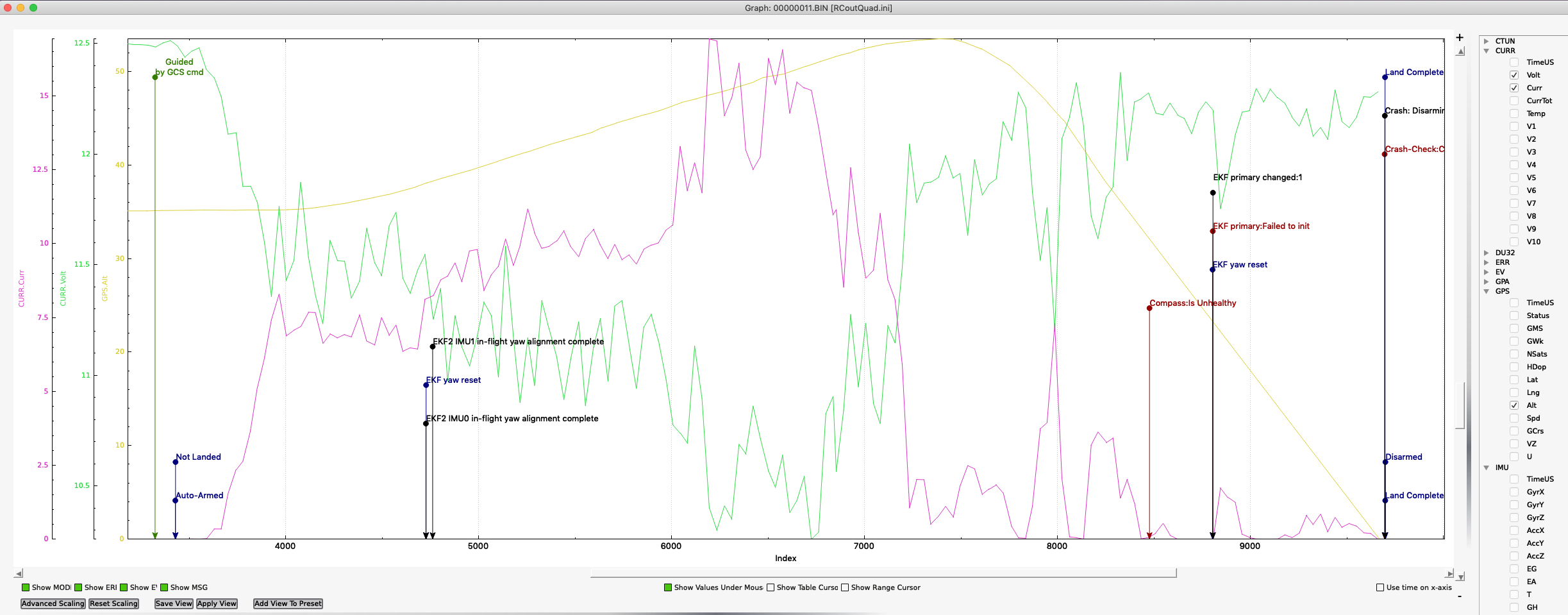
To start, your battery is hardly keeping up with the required current, dipping below 10.3 not long into the flight.
But the interesting part is at the end when it is losing altitude, current consumption drops to zero.
Was it in free fall?
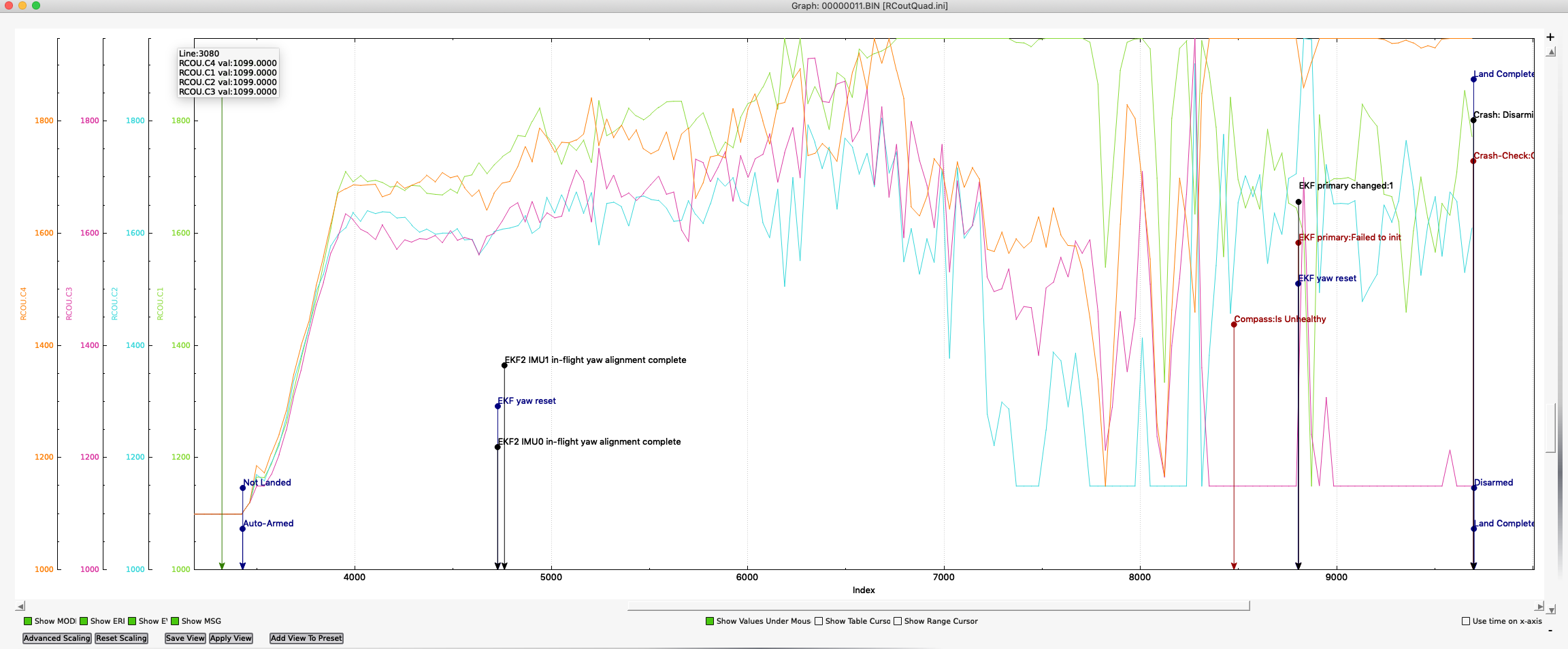
But this is not what your motor outputs are indicating, as the flight controller was fighting for stability maxing out some motors and shutting others down.
Do your ESC’s have voltage cutoff still active?
Also note that your motors are pretty much maxed out.
The copter is somewhat overweight/underpowered.
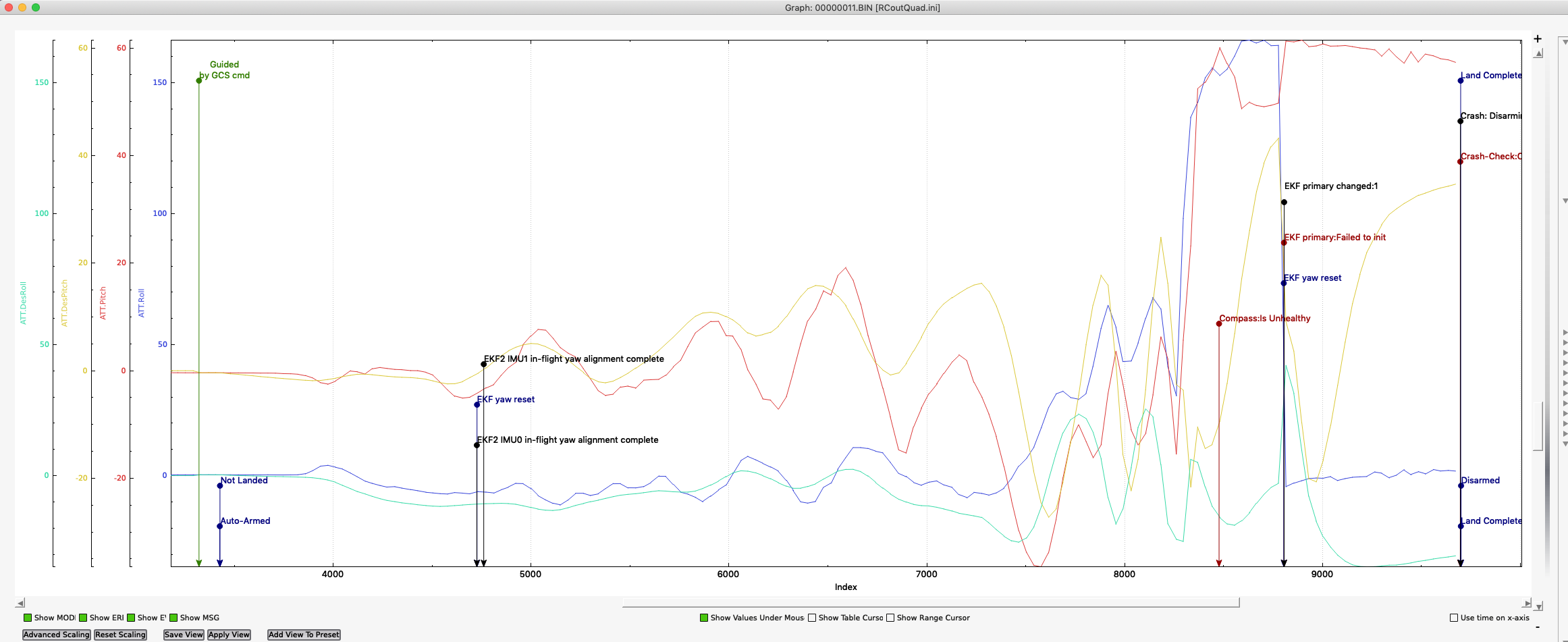
Have you autotune this copter?
Your desired v actual roll/pitch are not very tight.
This could also be in part due to the lack of power (battery and motors may be in play here)
But of note here is a distinct vibration event, as @dkemxr points out.
Your vibrations are excessive, and of course go ballistic on the way down.
You need to address this before anything else.
Unbalanced or damaged props, motors, flex in the frame, there are many causes, but start with your props.