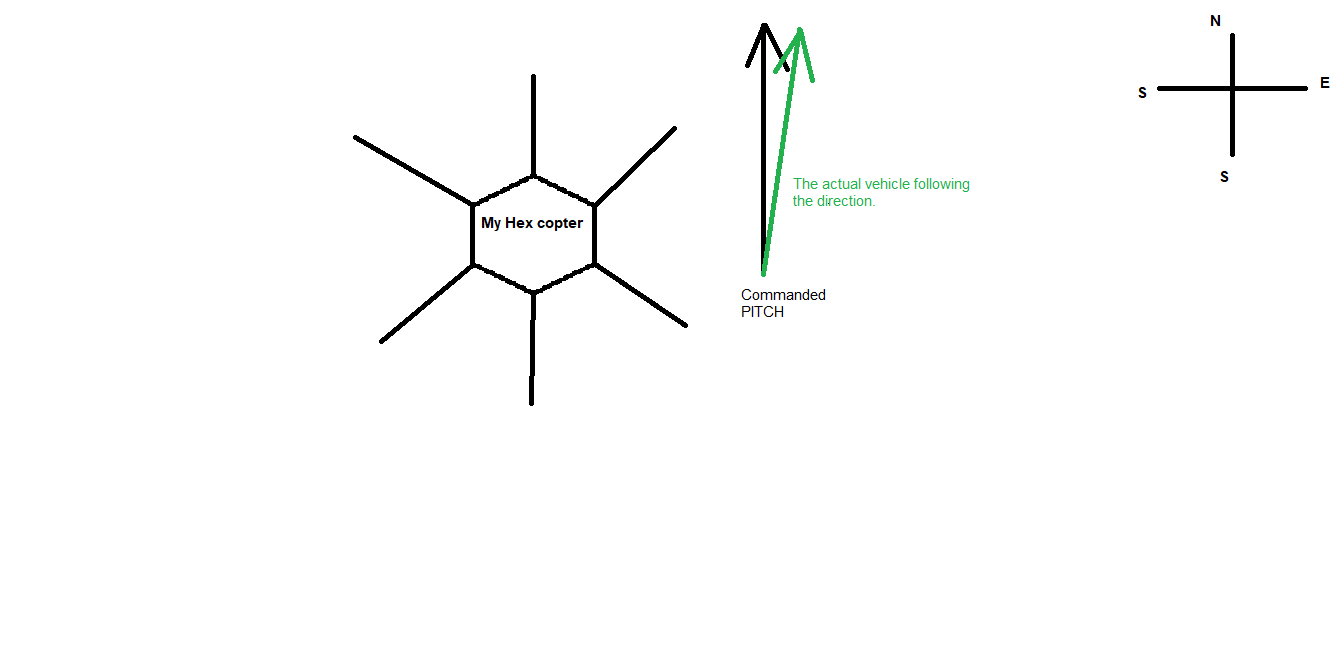
I am tuning(manually) Big hex copter, For visually flight is ok, But when we are giving forward and backward pitch drone is flying some angle. please give any suggestions.
hex details
frame size=1900mm
Motors=100KV (T-motor)
propellers= 32inch
12s and 22000 mAh battery
log hear
What angle are you talking about? “flying some angle” is very very loose sentence. You need to be a lot more precise and verbose.
1 Like
Thank for reply @amilcarlucas Sir.
Sorry @amilcarlucas sir, I will explain. I am not perfect in English.
Thanks and regards
Mohan
Are the arms of the copter twisted? do all motor point straight up, or are the a bit twisted?
1 Like
Before manual tuning, I recommend you to do AutoTune.
Follow these tuning guides.
You have a reasonable flight but PID values are not good enough.
Yaw controller could not be able to hold the vehicle at desired yaw angle.
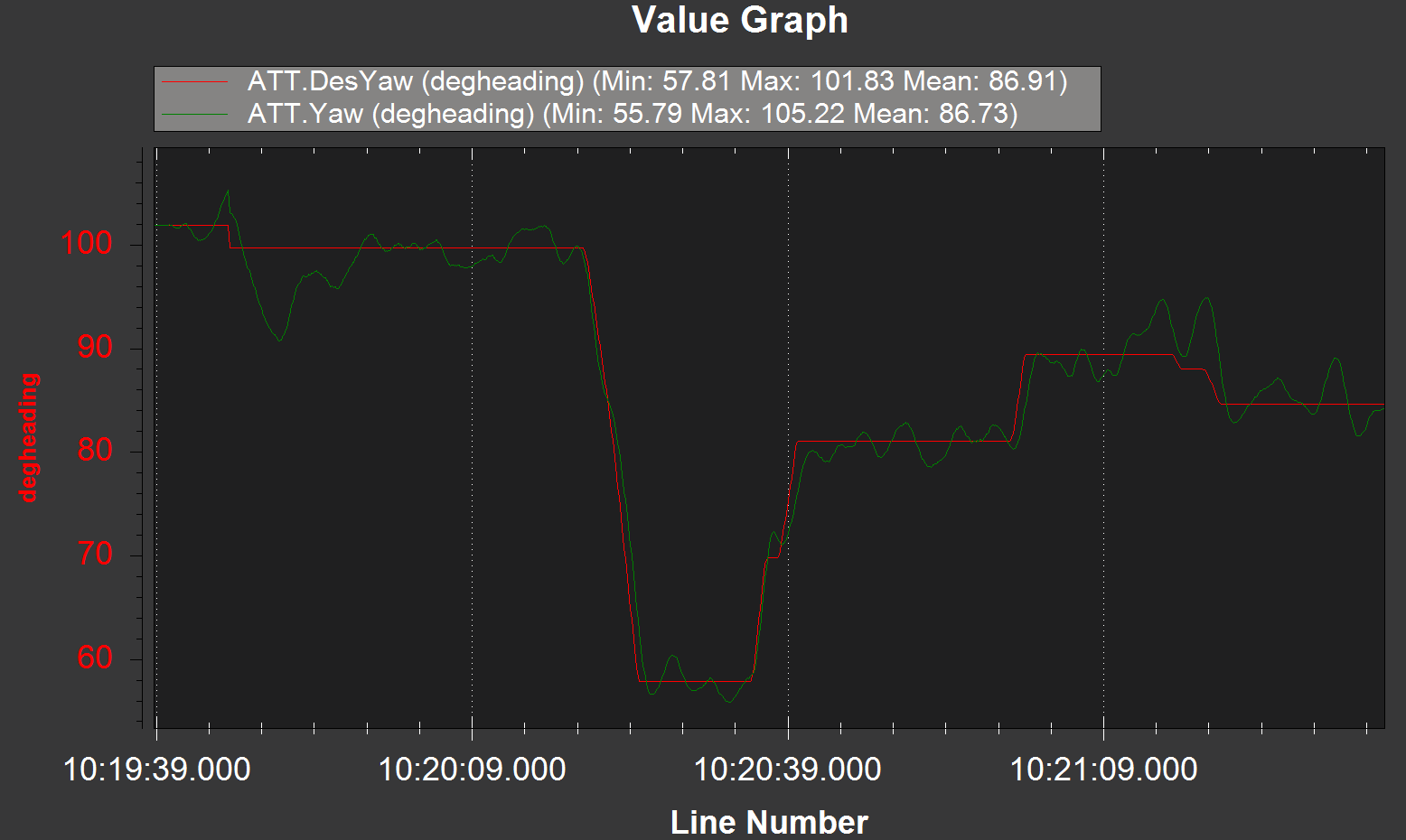
This might be the issue.
This is only the yaw axis, other axes also not too good.
After successful AutoTune you can go through the manual tuning.
You have a really big bird, act carefully and don’t try to do tuning without calm weather (preferably no wind at all!).
1 Like
I would recommend performing a level horizon calibration as well as a radio calibration as well. Its possible those might be causing some of the drift you are noticing
1 Like
@Mustafa_Gokce Sir, Thank you very much, for suggestions
Due to bigger hex copter, for doing autotune is not accepted by our team for me also its a big challenging. we are doing tuning based upon log data in the field. Sir any alternative methods are there for tuning of this big bird. ![]()
Thanks and regards
Mohan
@droningOn Sir, Thank you very much for your suggestions.
radio calibration is I did yesterday. I will include Log also. It is done auto mission. Today 2 changes are I did,1=ENA LE GPS BLEND and 2= Attached sprayer boom(4 meter).
Level calibration am doing every Take-off.
Thanks and regards
Mohan
I tuned 1500mm quadcopter using AutoTune with no issues (at least at AutoTune) thanks to @hosein_gh and @dkemxr.
This is totally your choice.
No, you should only do it once.
This log has better tuning.
Is it new?
1 Like
@Mustafa_Gokce Sir, Thank you very much,
Yes I read your posts. I learnt a lot of subjects from your discusses. Thank you to all.![]()
Ok Sir, I will follow this tomorrow onwards.
No Sir, This log is yesterday log, with out sprayer boom. Today we are add sprayer boom(4 meter)
Now I am examining today’s all logs files and estimating PID gains.
Sorry for late reply Sir.
Thanks and regards
Mohan
1 Like
Just an observation. The tuning guide, and the Mission Planner plug-in, may not calculate the best parameters for large props. There have been several cases now for craft with props in the 30-32 range where an Auto Tune with these parameters doesn’t perform that well. I’m talking about these as being too low:
ATC_ACCEL_P_MAX,13600
ATC_ACCEL_R_MAX,13600
ATC_ACCEL_Y_MAX,7200
ATC_RAT_PIT_FLTD,8
ATC_RAT_PIT_FLTT,8
ATC_RAT_RLL_FLTD,8
ATC_RAT_RLL_FLTT,8
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,8
Go ahead and try an Auto Tune as it’s configured but if the performance is poor this might be why.
2 Likes
@dkemxr Sir thank you very much Sir,
I am scared about doing Auto tuning. Is any another method is there, like examine log and adjusting gains.
If any wrong I did Please excuse me Sir.
Thanks and regards
Mohan
OK, I understand that with a large craft. The best way to do manual tuning is in-flight/Transmitter tuning using parameters on a configured Tune Pot (function and range). This is very time consuming but it’s how I do it. In the Tuning Guide there is a section for Manual Tuning of Roll and Pitch and a link to Transmitter Based Tuning.
But before you try that try these initial settings and make another simple AltHold hover flight and give it some pitch and Roll input. Not a lot but enough to see the response in a graph. +/- 5° doesn’t tell us anything.
ACRO_YAW_P,1
ATC_ACCEL_P_MAX,20000
ATC_ACCEL_R_MAX,20000
ATC_ACCEL_Y_MAX,9400
ATC_RAT_PIT_FLTD,11
ATC_RAT_PIT_FLTT,11
ATC_RAT_RLL_FLTD,11
ATC_RAT_RLL_FLTT,11
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,11
And because your vibration levels are a bit high for simply hovering and low speed maneuvers set this so we can look at the FFT.
INS_LOG_BAT_MASK,0
I assume that Cube Orange is hard mounted with the supplied foam tape?
@dkemxr thank you Sir,
Yes, we hard mounted with supplied foam tape.
Sir Now this is night time(India), tomorrow I at 8:00am I will do this test and send to you. @dkemxr Sir,Is POShold flight is Ok Sir?
Thanks and regards
Mohan
@dkemxr Sir above logs are have below log mask.
Above
@amilcarlucas All motors are
Sir.
Ah sorry, INS_BAT_LOG_MASK needs to be set at 1. And you didn’t set the tuning parameters.
1 Like
@dkemxr Sir, Sorry for late reply
Ok sir today’s flying time is over just now flying is finished. final log (BUT the problem is not resolved)
I am having full control over the drone Now. But when I am giving pitch command, cause some YAW
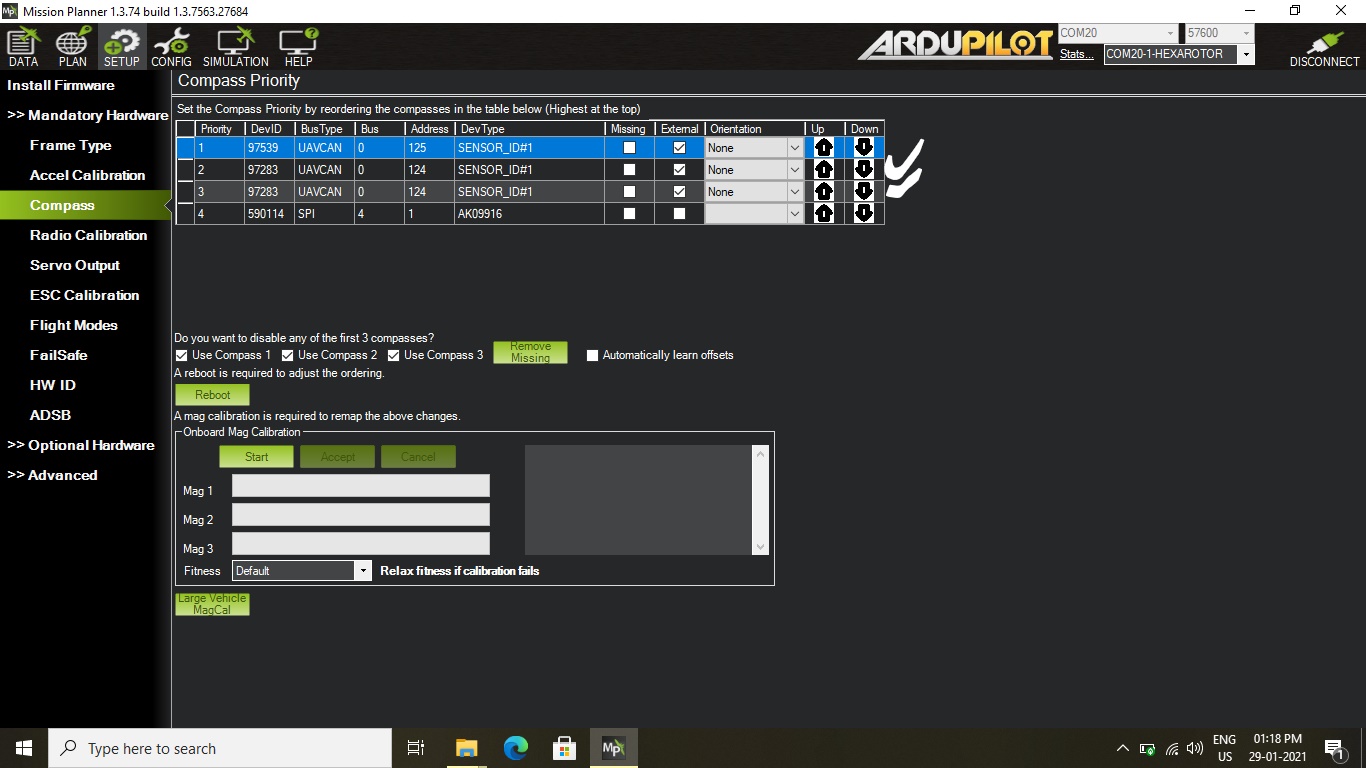
Sir, please observe the below picture, the same compass is showing 2 times.
Thanks and regards
Mohan
@amilcarlucas Sir, thank you for correcting Sir.
Thanks and regards
Mohan
All the parameters are still unchanged. Nothing to see here but a poorly tuned Hex.
You are running a -dev version of firmware perhaps there is an issue with how the compass’s are showing on that screen. Update Mission Planner to latest beta. Parameters say you have 2 Can compasses’s on your GPS modules and one internal in the Cube.
1 Like