I’ve only looked at the first log, but it looks like the problem happens in Loiter mode? If the drone moves in the wrong direction in Loiter mode, then the problem is your compass, not tuning. Recalibrate your compasses, and do a motor-compass calibration also.
1 Like
Reason for this is, Present Parameters are giving ok controlling over drone. First I change only ACRO_YAW_P=1 I have lost controller over drone. drone is giving it response with nearly after 1 sec. I don’t this loose if drone control is happened due to which reason. Again i changed ACRO_YAW_P=0.8. Then drone is controllable.
After I test with different Pay load
@dkemxr Today I will try to test your setting(but, I have a little bit of fear about drone control)
Thanks and regards
Mohan
Then don’t change anything.
@dkemxr
1St flight I am changing INS_LOG_BAT_MASK=1
@dkemxr Sir I did a test flight with the only INS_LOG_BAT_MASK=1. I having a little bit of fear of testing with other parameters. I am extremely sorry @dkemxr Sir😔. I am attaching today’s test flight log.
Using this setting and gains Hex copter good controllable. I think  I need to decrease I-gains in roll and pitch.
I need to decrease I-gains in roll and pitch.
I am very sorry @dkemxr Sir,
Thanks and regards
Mohan
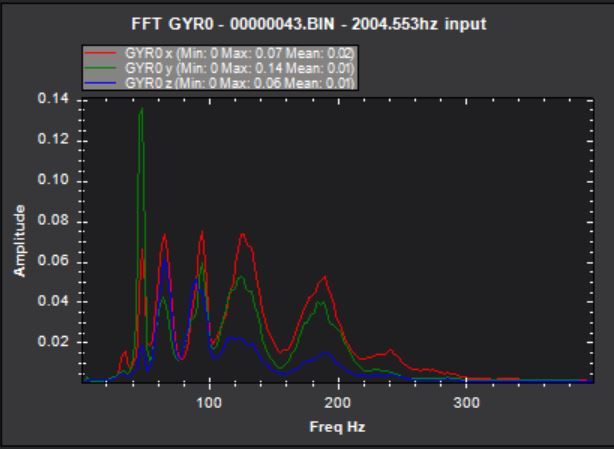
No need to apologize I understand you have a big craft and are afraid of damage. I was suggesting the Log Bat Mask be enabled so we could set the Dynamic Notch filter. This should allow you to get a better tune. But it’s an odd looking FFT graph, perhaps because there are 2 takeoff and landing events. You want to take off and hover in AltHold for ~1 minute then gently land. That’s it, no other flight modes and don’t fly around.
This is the result of that flight. There are many vibration modes close together. Was the sprayer attached?
1 Like
@dkemxr Sir, Thank you for your support.
Actually today one flight is crashed, due to the front 2 motors are tilted in the air.
After repairing Hex copter, I have taken this flight.
Yes sir.10(liter water)
@dkemxr Sir Is loiter flight mode is Ok?
tomorrow we are making some changes in frame, at motor and arm joint.
Thanks and regards
Mohan
You will want to make a test flight with the tank empty. Yes, loiter is OK.
1 Like
@dkemxr Sir,
Yes, Sir, I will do Sir.
Thank you for your confirmation, Sir.
Thanks and regards
Mohan
@dkemxr Sir, Thank you very much. 
Today We did a hover test Please find the log. And give me some suggestions.
I Tried Auto  , Hex is going well and stable. Give any suggestions Sir. Auto log.
, Hex is going well and stable. Give any suggestions Sir. Auto log.
Thanks and regards
Mohan
Set the parameters as I indicated above. And these:
INS_HNTCH_ENABLE,1 (then refresh parameters)
INS_HNTCH_ATT,40
INS_HNTCH_BW,35
INS_HNTCH_FREQ,70
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,.175
INS_LOG_BAT_MASK,2
Then make another Hover flight for ~1min and post that log,
1 Like
Ok, @dkemxr Sir,
I will do this tomorrow and I will send the log to you @dkemxr Sir.
Thank you very much, sir.
Thanks and regards
Mohan
@dkemxr Sir above parameter value is 1.75 is right,(175 typing mistake). Sir Present i am going with 1.75.
Thanks and regards
Mohan
No mistake, It’s .175 (point 175) as I typed it. This is the Mot_thst_hover value. You should read the Wiki for the dynamic notch filter so you understand what these parameters mean. So you have to run the hover test again.
1 Like
@dkemxr Sir,
So, I need to put INS_HNTCH_REF=0.175 Sorry for my mistake Sir ![]()
Ok sir.
I will do the hover test tomorrow again(INS_HNTCH_REF=0.175) ![]() , and send that log, Sir,
, and send that log, Sir,
Thank you, @dkemxr sir
Thanks and regards
Mohan
are you thinking vibration normal modes of the sprayer boom or payload? those modes seem multiples of a natural frequency in each axis.
1 Like
Before doing the flight set these:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
Yes, harmonics of either the ~70Hz mode or the smaller one at 35Hz. Depending on what the post filter analysis looks like it may be better to target the lower one and include one more harmonic. Alternatively a static notch could be used at 35Hz but I have not had great results with this approach.