One small question, with a small D, the drone will be less reactive, right? So this means that it will have more problems with the wind.
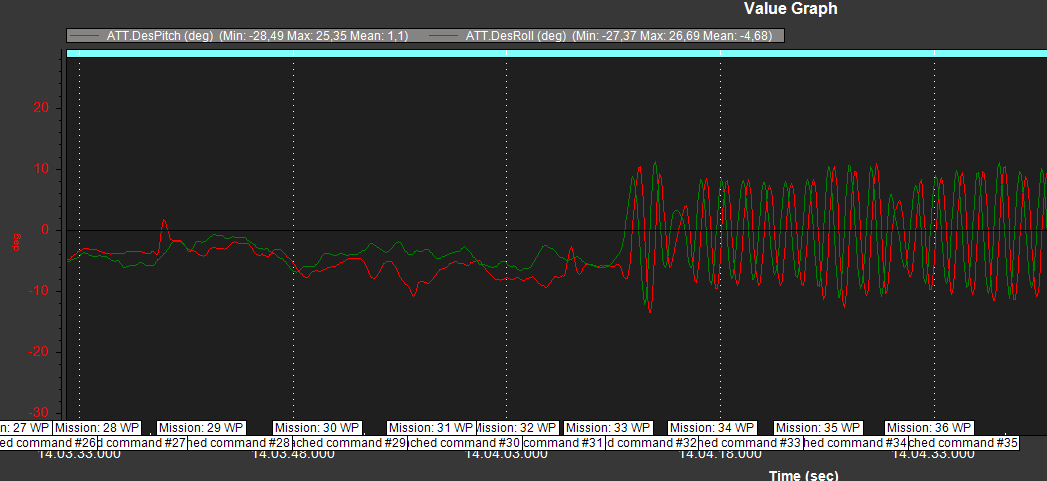
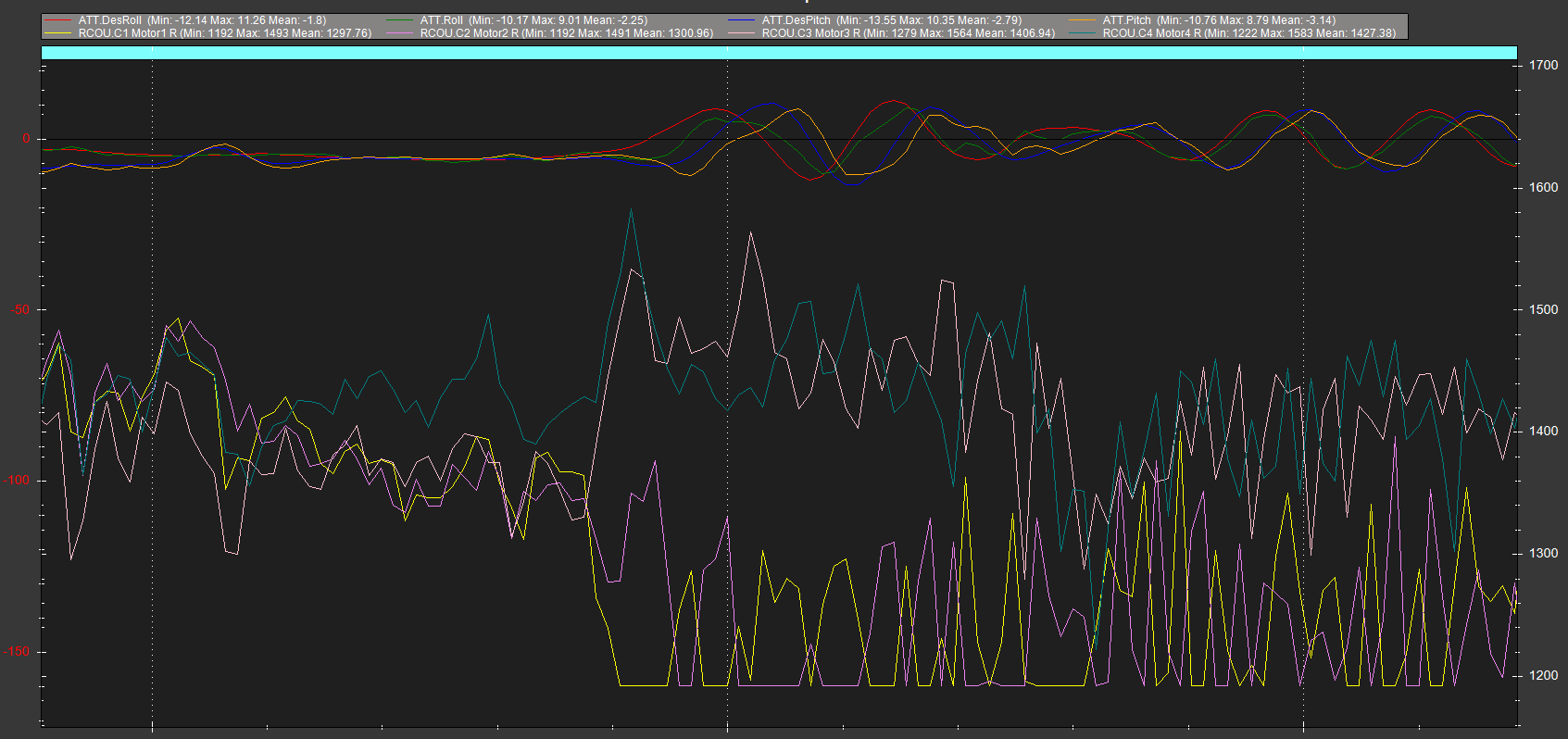
I was checking some logs of crashes that I had, and I found this one of 2 years ago. We saw the oscillations and though that it was because the PID was not good. Can you say that this drone crashed because of the wind and low value of D ?
In that case I cannot lower D value a lot, or I need to stop flying when there is wind?
I would love to know this before starting to check my new configuration
In that old log, that is not a D term oscillation. D terms tend to produce small high frequency oscillations that are often not visible to the naked eye. A whining or mechanical noise from the motors and heating is usually evident if D is too high.
This looks like the quad got hit by a disturbance or weight shifted (battery) and two motors are not able to go to low enough output to maintain stability. It looks like everything was at defaults too, so PIDs wouldn’t suit 15" props and low KV motors - reactions were not suitable.
On another project, autotune engaged but fails to level, please tune manually again, of course, guided by you previously, the Harmonic Notch filter was applied and vibrations were reduced before Autotune started.
Can I just focus on the above sets of values to change before I attempt the autotune the second time? for ATC_RAT, you seem suggestions to increase D, and reducing P and I. For ATC_ANG, you seem to suggest increasing them.
1 . You can certainly try those PIDs you listed and see if flight is stable enough.
2 . I would advise using the latest stable firmware version
3 . PSC values can be usually ignored unless there’s a problem. There is reason to adjust a couple after initial hover tests: PSC_ACCZ_P and PSC_ACCZ_I
If you think there’s a position holding problem, possibly affecting Autotune, do these steps in order.
Test by using AltHold and do some hovering and movements, then switch to Loiter and do the same movements - observe if there’s any apparent instability or oscillations in Loiter.
PSC_VELXY_FLTD,5 down to new value of 2.5
Observe and gather log. If that fixes it great - no further action.
If it’s not resolved just change this
PSC_VELXY_FLTE,5 down to new value of 2.5
Observe and gather log. If that fixes it great - no further action.
If there’s still no fix, try these
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
Autotune, I am curious to know, for the same drone, if underwent twice successful complete roll tune for example at the same venue, same environment condition, will the tune results the same or close?