Hi everyone, i need help from someone in terms of setting the PIDs correctly for my drone. I managed to fly with standard PIDs in stabilize mode but it was really bad. Thanks in advance. I changed some of the initial params but generally they remain the same.
Yes, tuning is very bad. But the thrust/weight is much too low also and no battery logging. I would deal with those before further tuning.
Hi and thank you for answering, what do you mean by thrust/weight too low? Also where would you start with tunning PIDs?
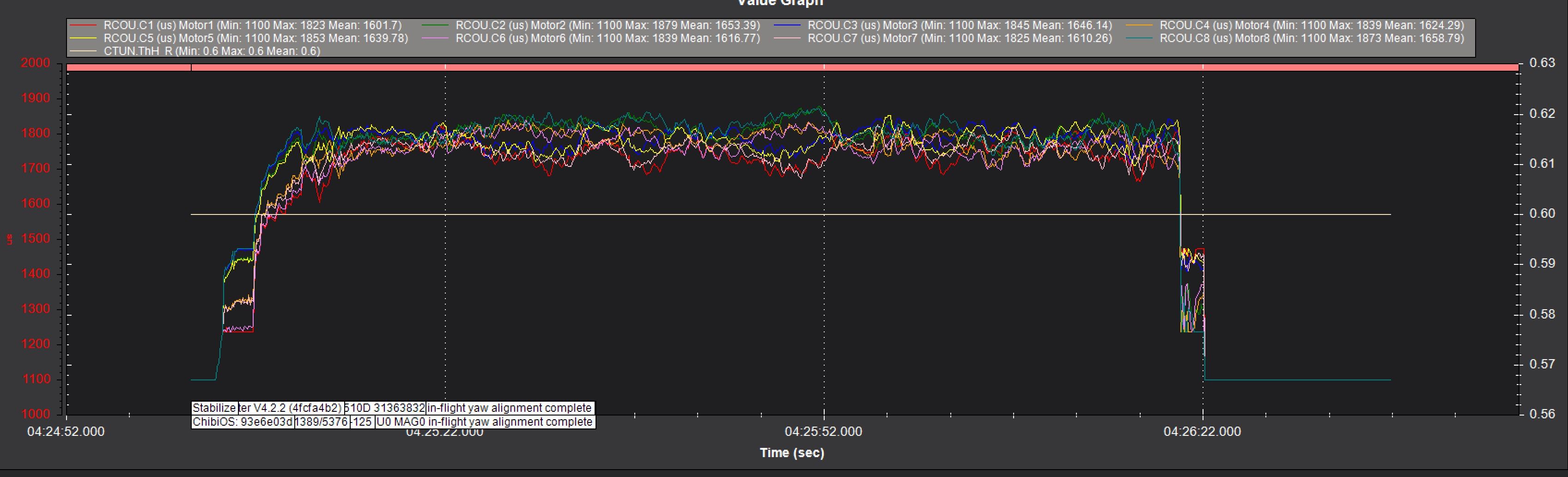
It’s underpowered/overweight. The average motor output is ~1800us. It should be close to 1500 at hover.

So, that has to be addressed. Add battery logging or these don’t function:
MOT_BAT_VOLT_MAX,16.8
MOT_BAT_VOLT_MIN,13.2
Do you really have a 4S battery on this craft as these values suggest?
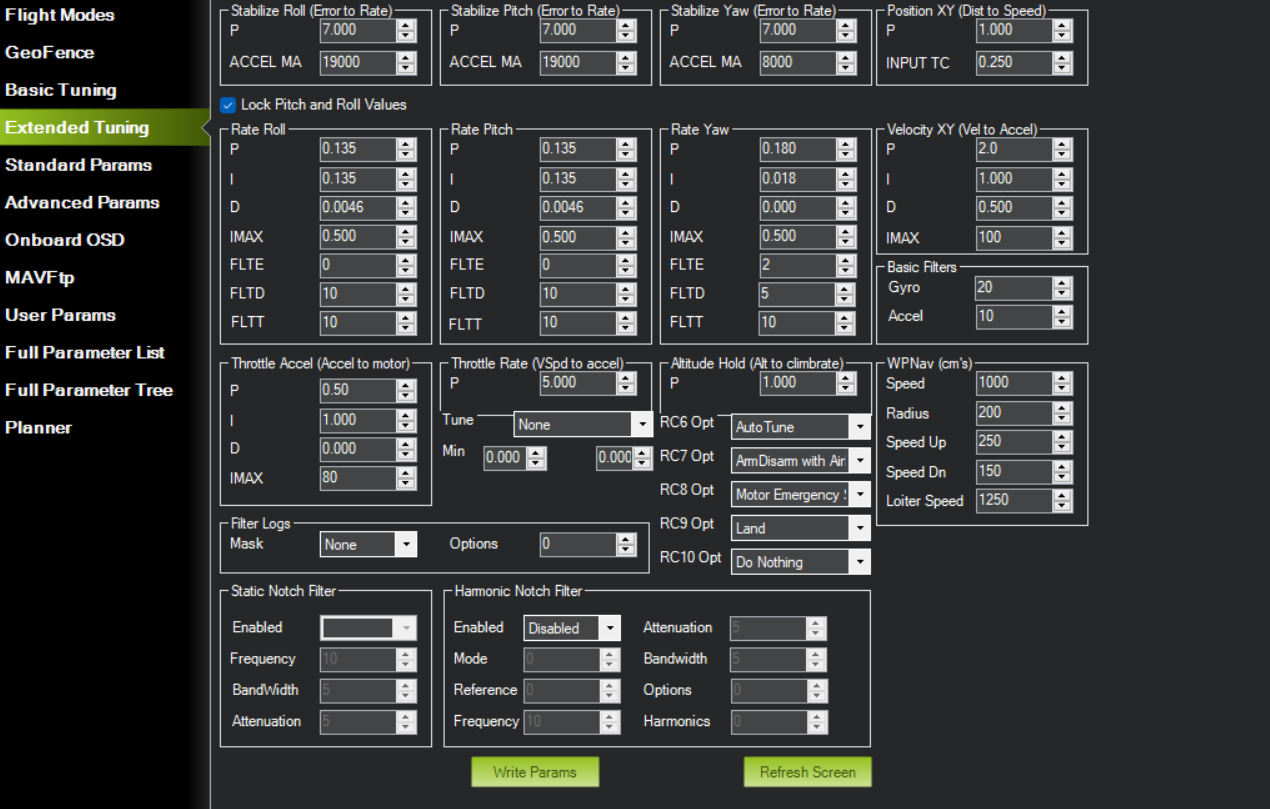
And configure the Dynamic Notch Filter.
Then start tuning.
Ok i understand that. No i have big 2 14s batteries so i can run those strong engines. How should i configure Dynamic Notch Filter?
OK, then set those 2 parameters back to 0 until you have battery voltage logging.
By following the Wiki guides.
Dynamic Notch Filter
Use Throttle based Notch:
Throttle based Notch
The first step is to set INS_LOG_BAT_MASK to 1 and make a hover flight in AltHold for a minute or so.
But, once you fix the the thrust/weight issue you will have to do this and tuning over again.
I am afraid to engage alt hold mode with so bad PID tunning. What do you think?
So when in Initial Parameter Setup i write under the Battery Cell Count 14 the new calculated Initial Params are 58,8v for MOT_BAT_VOLT_MAX but that is out of range because it goes up to 53v in full param list. I enabled both harmonic notch filters and set both MOT_BAT_VOLT to 0. Will try to fly again.
Write it anyway, those are just suggested Max values that don’t always apply. But anyway w/o battery logging they do nothing so ser them both to 0 until you do have battery logging.
Hello, so i managed to do a flight with LOG_BIT_MASK SET TO 1.
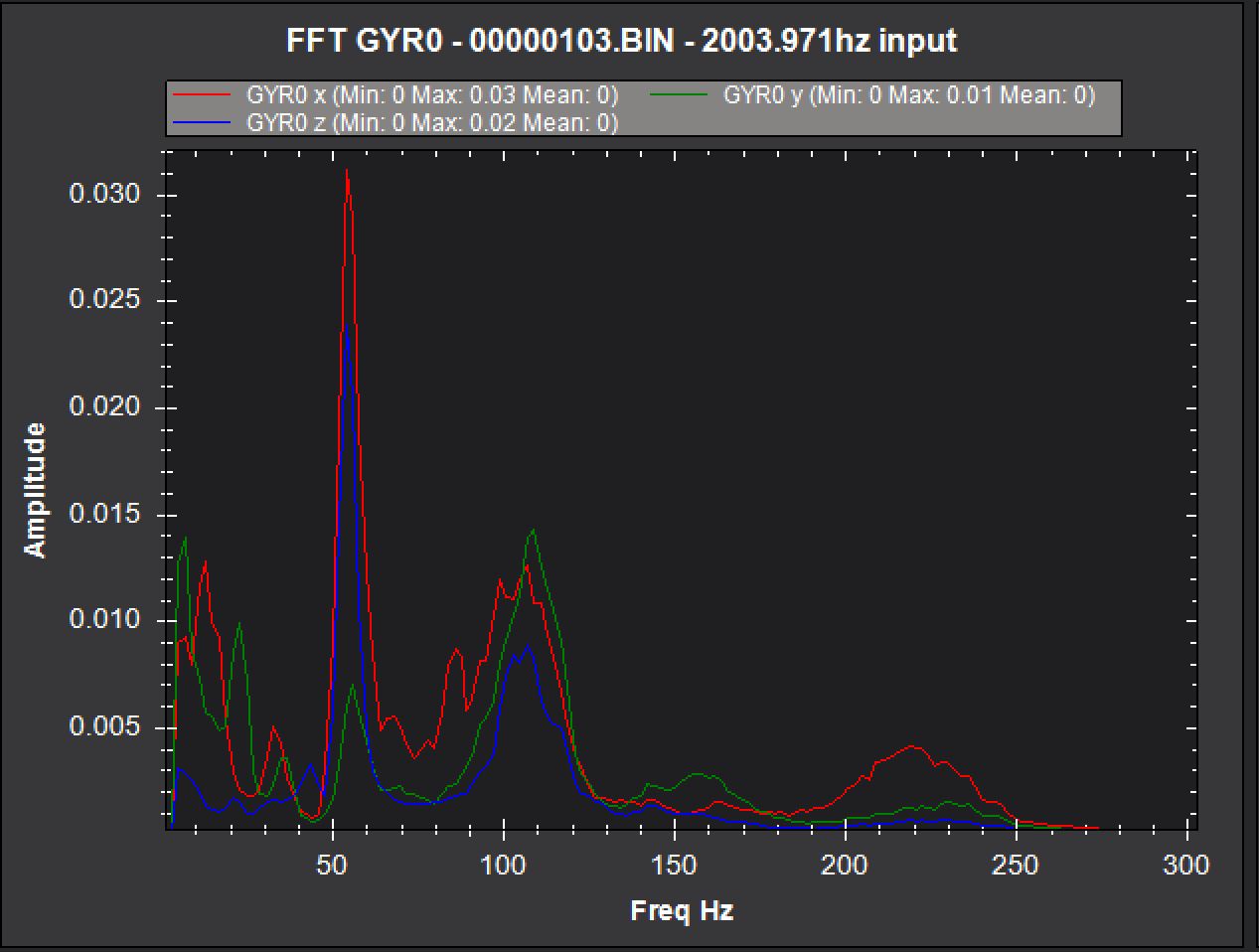
This is log file Log file
Hope you can see results in temp/FFT graphs.
All I continue to see is an underpowered/overweight craft. I don’t see the point in tuning this until that is corrected.
I cant handle that, its the way it is. How can i configure now frequencies from the FFT graphs?