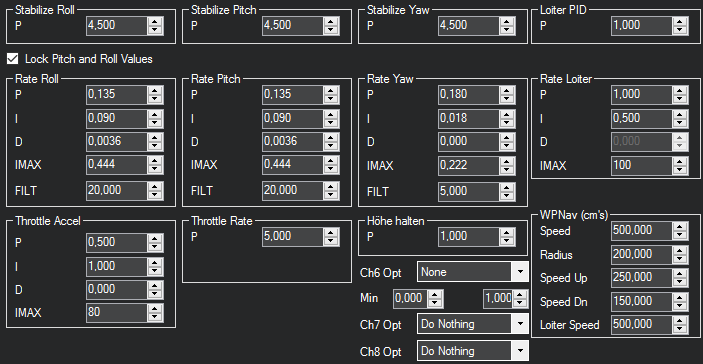
I was flying my 10kg copter today with the standard PIDs as they come after having flashed the copter on 3.4.6 (on a new flight-controller). That was not working to bad in stabilized mode. But the Inputs from my rc-controll where doing a much to intense steering signal. So the copter is by default set to a max tilt rate of 45°. When I do move the roll stick for 1/4 of its way to right, the copter goes to a full 45° Roll movement. How can I correct this? @juzzle1 What does ATC_RAT_PIT_FILT help? I fount the following information “For large copters (with props at least 13inch or 33cm diameter) set the Rate Roll and Pitch filters to 10hz (in Copter-3.3 these are RATE_RLL_FILT_HZ and RATE_PIT_FILT_HZ, in Copter-3.4 they are ATC_RAT_RLL_FILT, ATC_RAT_PIT_FILT)”, but I dont know what it regulates!
Do you have expo configured on your RC transmitter?
I use an FrSky Taranis and generally use ~40% Expo on Roll and Pitch, and ~20% on yaw.
This makes the control much smoother.
As far as I know, ATC_RAT_PIT_FILT and ATC_RAT_RLL_FILT control low-pass filters on the rate controllers. Someone more knowledgeable may be able to explain further.
I did the ATC_RAT_PIT_FILT and RLL_FILT to 10 Hz, did reduce the RC_Feel and performed AutoTune on Roll, Pitch and Yaw. The result is astonishing. After attaching a new Battery, i recognized some jitter, and I think I will reduce Rate_P on Roll and Pitch some ticks.
On Yaw, I still have bigger problems, when I do quicker Yaw-Movements (more tan 90° per second), the copter does significantly loose height.
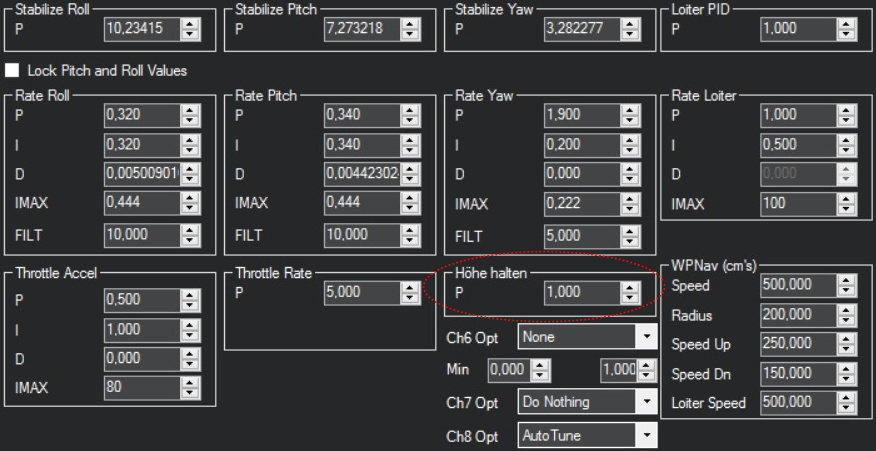
Maybe I can correct this with POS_Z_P?
I think thats this value here?
If you are losing height in Altitude Hold when doing a yaw then your aircraft is using too much power on your yaw and not leaving enough to maintain height. You need to back off the aggressiveness of your yaw command.
Drop your ATC_ACCEL_Y_MAX by 50% and drop ACRO_YAW_P to 3. What are those two parameters set to at the moment?
If you find your tune is a bit twitchy then drop your AUTOTUNE_AGGR to 0.05 and do Autotune again. Make sure you save your old parameters first.
I was flying ATC_RAT_PIT_FILT and RLL_FILT to 10 Hz for several month now for a 11kg Quad. Under normal conditions it works great. But under heavy gusts, the PID seams to be too sluggish. The copter seems to have to less response and does wobble.
How about setting the %_FILT to a higher rate like 15 Hz? Could this make the copter more responsive and having a more precise regulation on Pitch and Roll?
(by the way, I have upgraded to 3.5.3 in the meantime).
That tune looks much less aggressive than the one earlier. If you have not changed anything then I suspect that tune did not go as well as it could have.
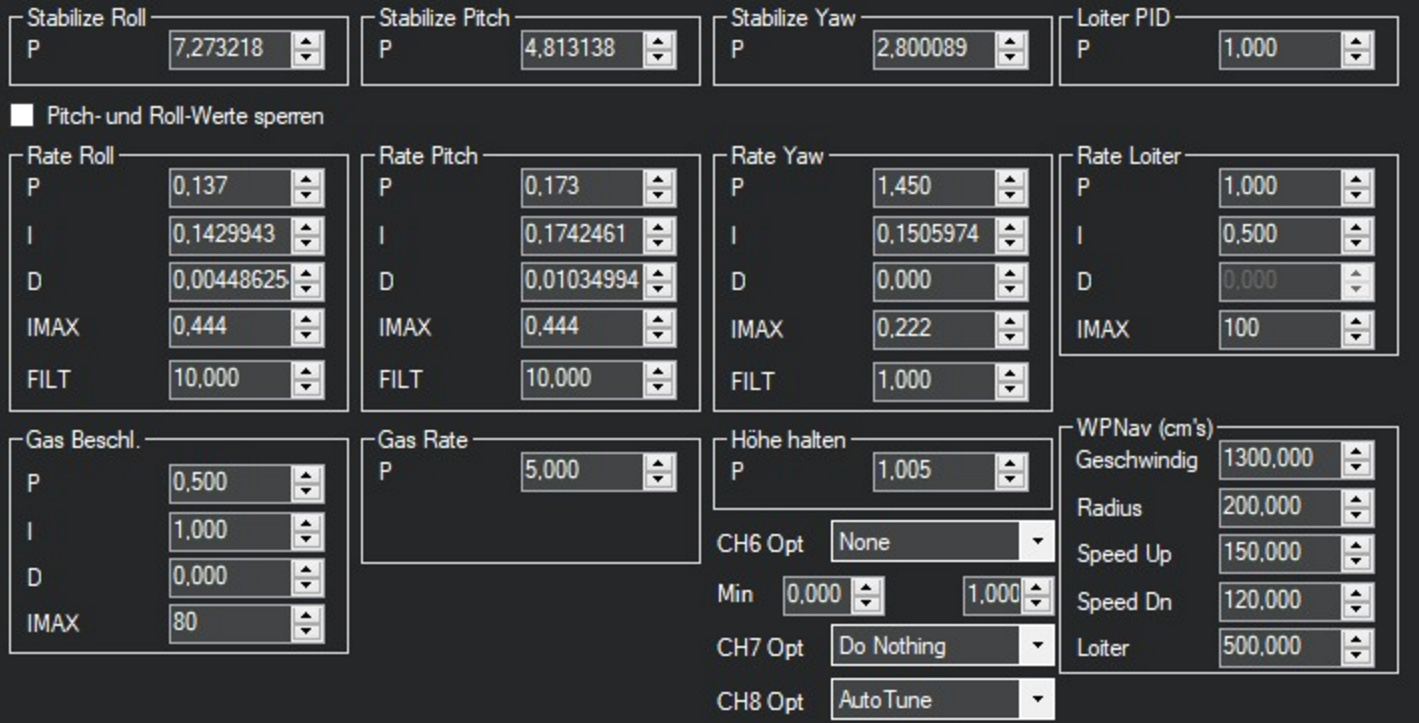
The PIDs above are the ones I will go for a tuning flight tomorrow. The ones I posted earlier are from another copter. What if the ACT_ANG_ %_P values will rise above 10? Should I increase the HZ-Rate from 10 to maybe 12 or 15?