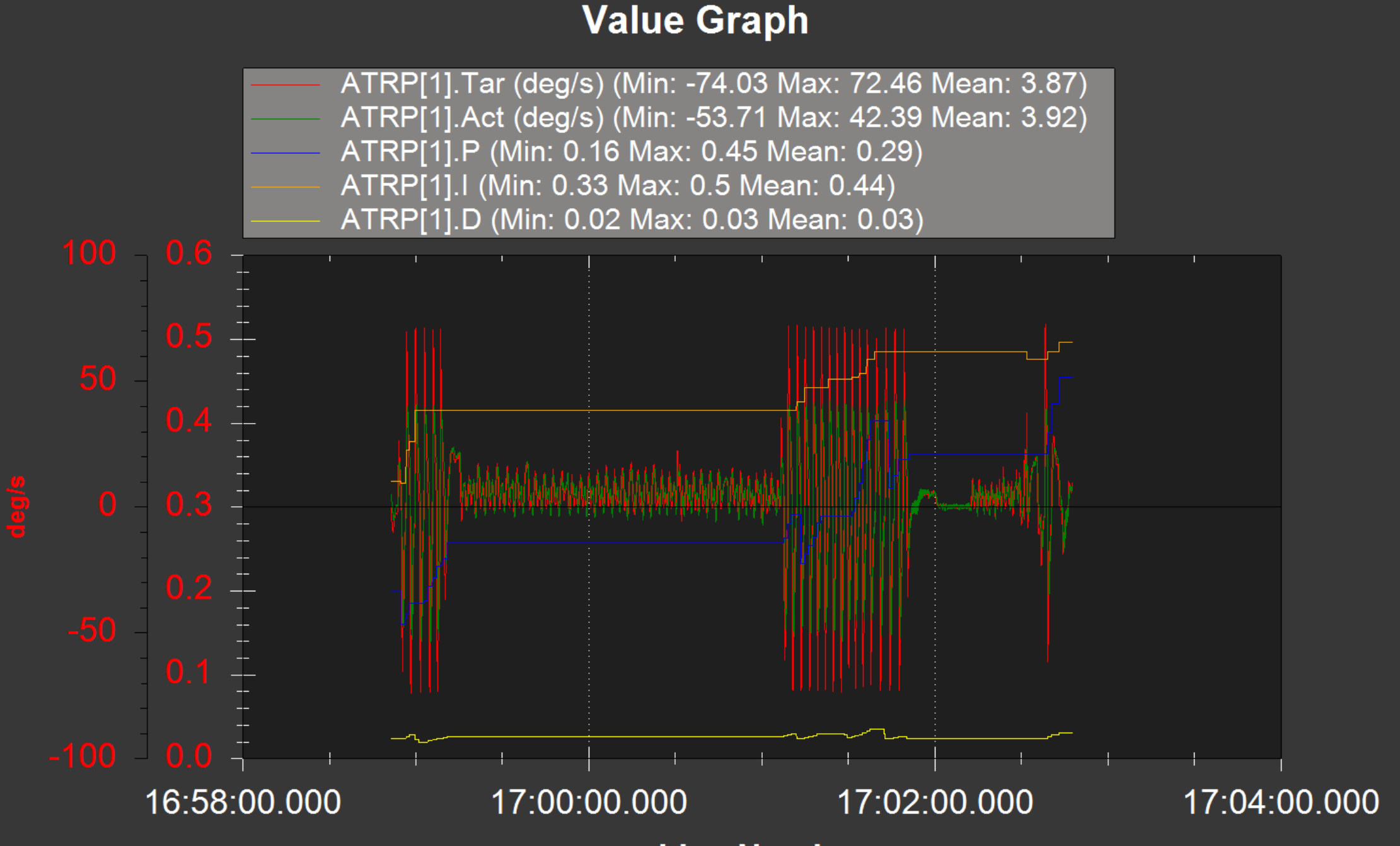
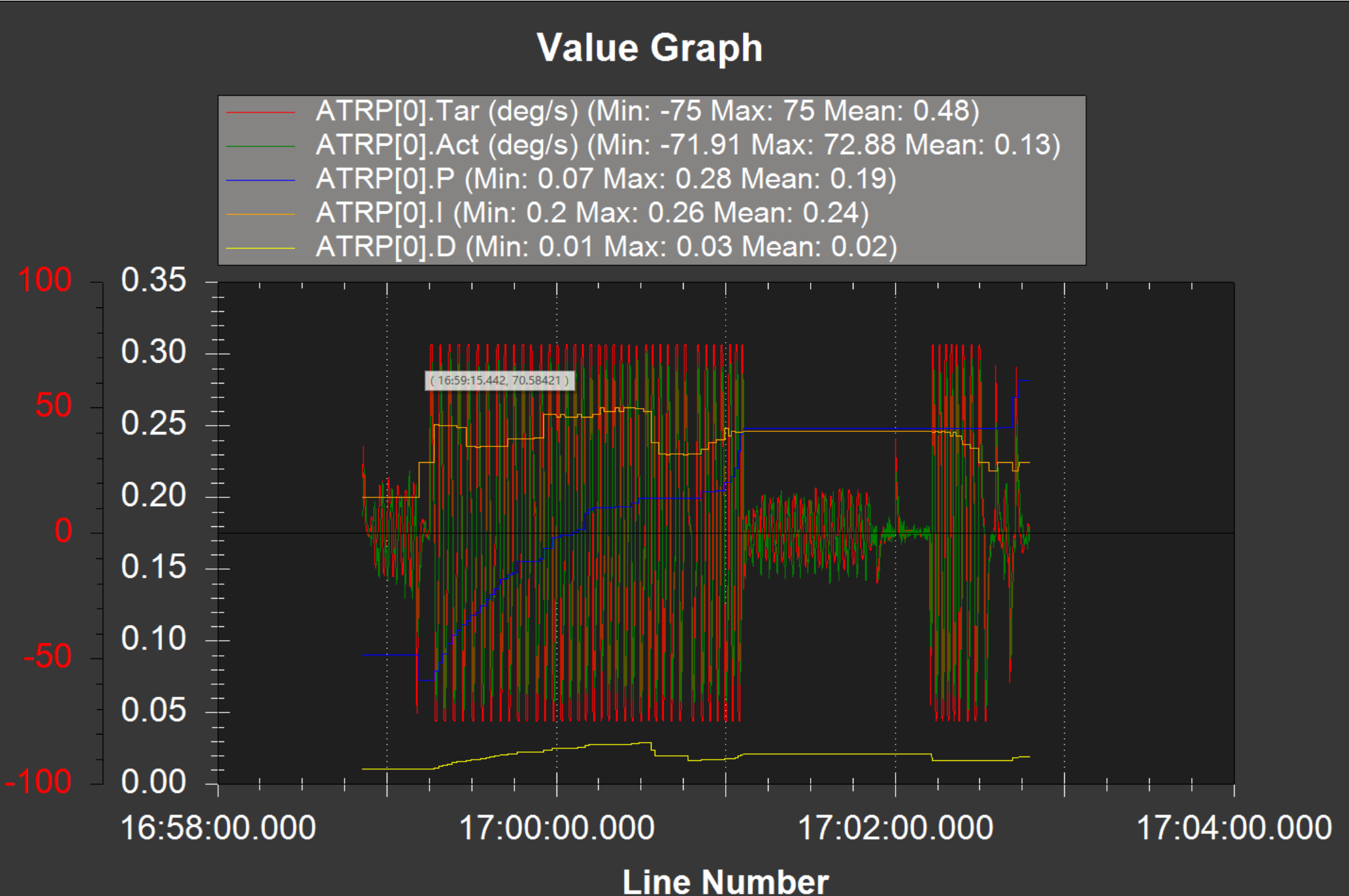
I have noticed that the target rate and the actual rate are supposed to get closer as the tuning is going forward. but it did not happen on my case. what did I do wrong? I really appreciate if anyone can tell me how much should I change the PID in the case. https://ardupilot.org/plane/docs/automatic-tuning-with-autotune.html
try autotune with the “latest” firmware…Tridge recently changed the algorithm…
-4.0 Stable uses the old classic autotune that usually produced safe but not optimum tunes
-4.1 Beta has a new algorithm with much better optimization, but has issues in some planes
-current master (“latest” firmware) has many improvements to even the current beta release
I’m sure somebody here can give a better answer, but dev is short for development. Dev versions come before Beta so they will be less finished. And they are changed more often so it’s harder to keep track of what dev version you’re on.
When you select beta versions in MP it will give you the latest beta version. Or you can manually selected it if you want but I just used MP To give me the most recent.
dev is the label for the master branch which gets changes daily…it gets built several times a day is available under firmware.ardupilot.org as “latest”…you can also load it in MP by choosing ALL OPTIONS on the firmware page…
beta is a pre-release and is updated during the rollout to a stable release with fixes as bugs are discovered during wide area flight testing by users…usually the fixes are non-critical…reading the release notes can give you an idea of the progression and what fixes have occured
stable is the stable release…
any of these can have bugs, but before any change is made to master it gets tested extensively
I fly master (“latest”) almost exclusively…
@xixijoe that commit (6f3e3a91) was made into master branch yesterday…the current plane beta has the improved autotune, but either one has it
@hwurzburg
I think I understand it now. I guess I was influenced by Inav for fireware updating. Inav needs full erase and reload all the param again. I did not know the apj is an update without erasing the params. and another time I am being careless that I did not read https://firmware.ardupilot.org/
You’re in the wrong page. You are on the “install firmware legacy” and you should just be using “install firmware”. The tab right above the one you’re on.