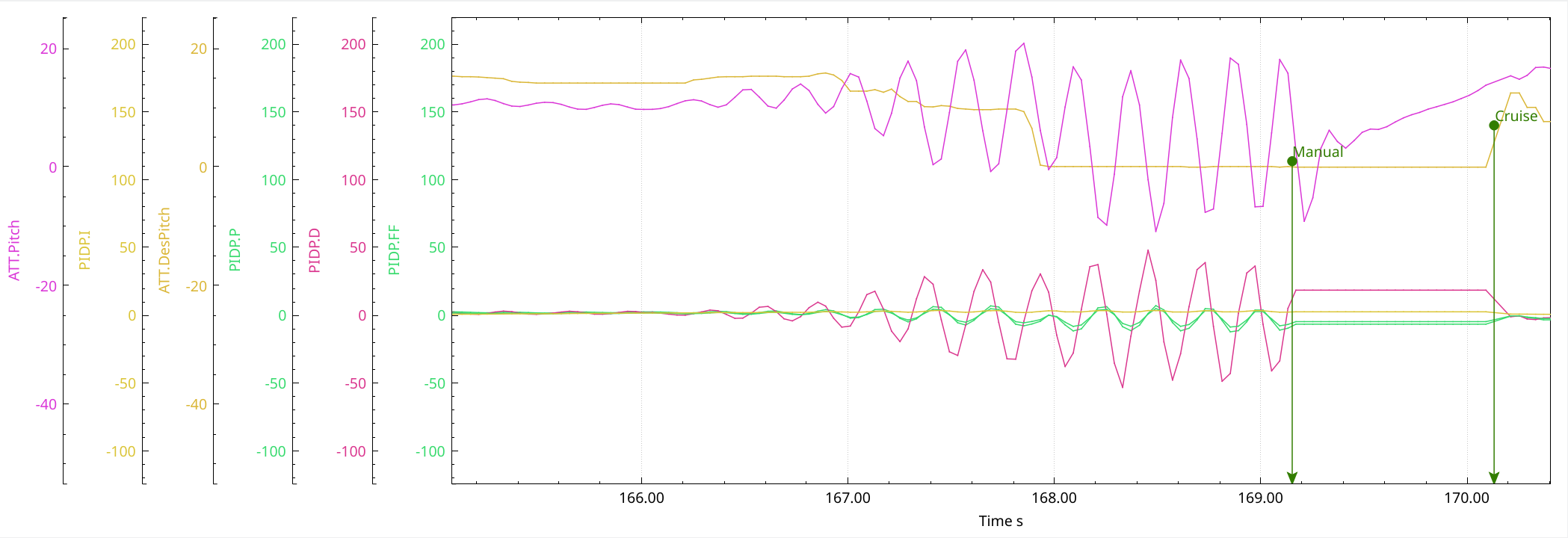
Additionally, during level flight I sometimes have to switch into MANUAL mode before the oscillations get out of hand.
Is the correct interpretation of these graphs that the D explosion is the major driver of my oscillations? P and I seem to be affected by D but always after a lag.
I am assuming this is the issue and I will lower my PTCH2SRV_D from the autotune’d value of approx. 0.07 to 0.04.
Is this correct? Is there anything else I should watch out for?
These delta wings are very short in the pitch moment, due to having no tail length. So yes i can see how the standard tuning ratios work for a standard plane but cause oscillation in a wing.
I have test today,i try to reduce the D GAIN of pitch,but it return to default value set by autotune level after reboot the FC,it seems the ptch2SRV_D CAN’T be change by mamual input,Does any body know how to chane it
The PID gains can be changed manually. The vast majority of the parameters can be changed manually. Did you click on write params after typing in the change?
I would also suggest taking a step back and learning about PID control to reduce the SWAG approach. SITL might be helpful if you don’t want to risk experimenting on a real plane.
You need to land, then switch to AUTOTUNE flight mode as the plane sits stopped on the ground, and only after you do this should you DISARM. This is not documented anywhere and I do not remember how I found out about this.
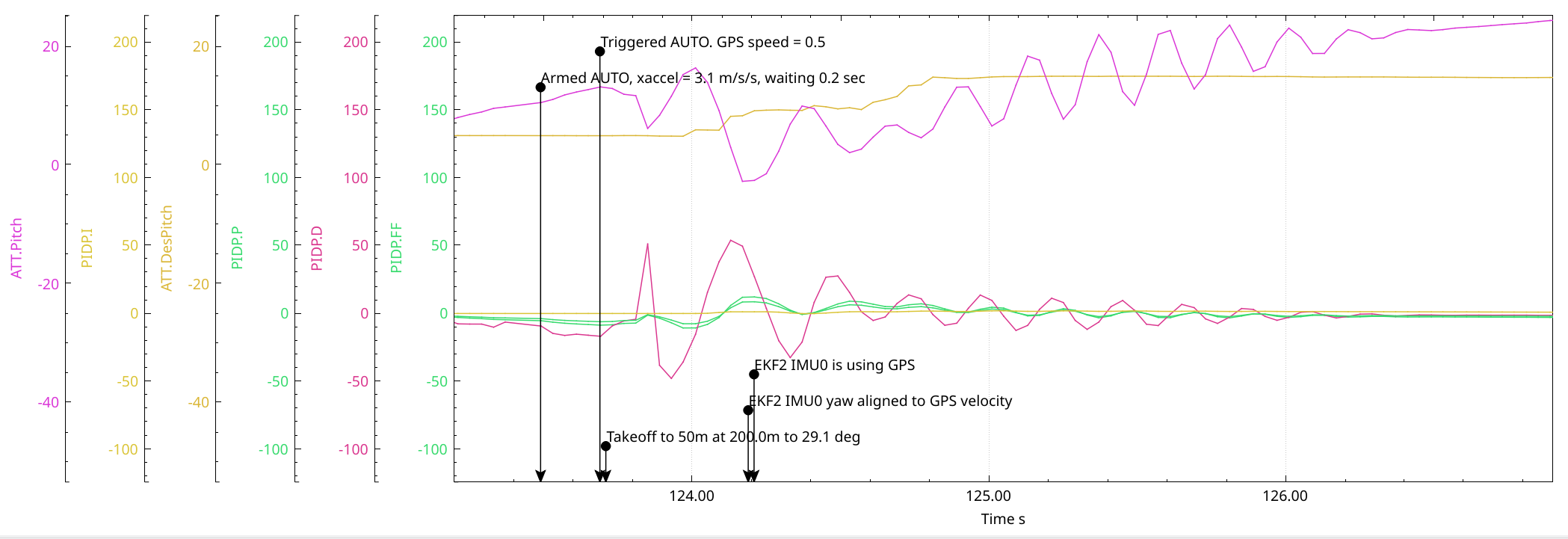
Ultimately my plane crashed after the 10th or so launch because Ardupilot was unable to level off after a beautiful vertical climb and stall immediately after take-off. It stalled at around 90m altitude and was unable to recover pitch and level off. It went into the ground full throttle and nose first. I will post more data from the crash soon. The inability of the autopilot to attempt to level out after a stall in an automatic navigation mode concerns me greatly.