Hi,
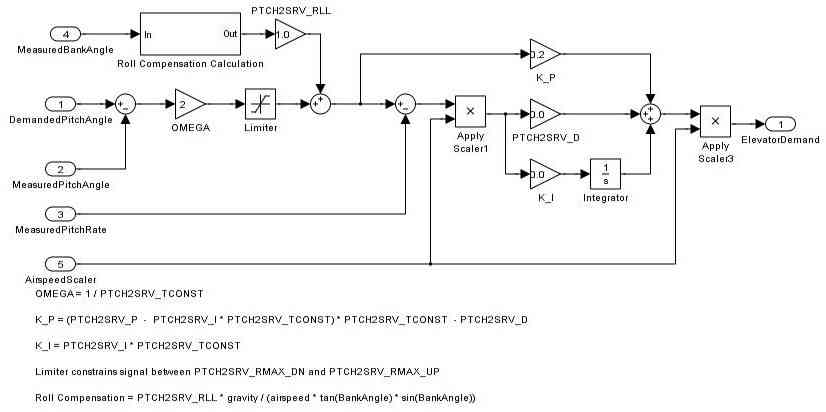
I am pretty new to ArduPlane and I have some question regarding the PID controller. As the document described, the ki gain is in the down stream of the rate error. That will make the control output of this loop very similar to the kp loop, since integrating rate error will get position error. This loop is not exactly the I loop for attitude control from a classical control theory point of view. I’ve put together a Simulink 1 DOF model, and figured out this “ki” loop barely trim out the residue of the position error, it’s approaching the reference target slowly (asymptotic). It’s also eating up margins to the kd loop. Was it a mistake in the picture?
{kind=link}