Hello,
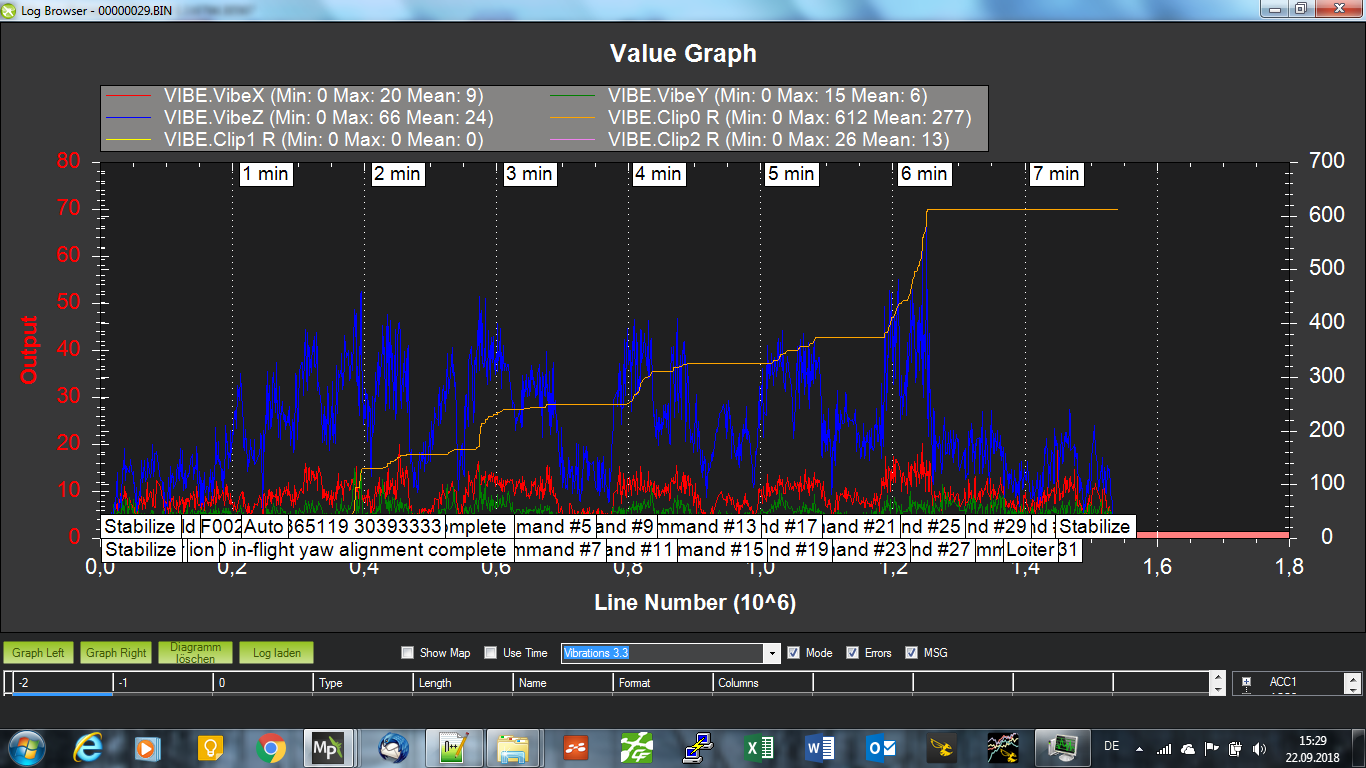
I just tested a new build Tarrot 650 Sport Quad with 15inch props (T-Motor Folding Antigravity) and I noticed very high clipping values >1000.
The vibration in the logfiles don’t look to bad and I tested the copter with full throttle, holding it above my head and I could’t feel anything dramatic…
Should I use some anti-vibration mount for the PH2? Right now it is just screwed onto the top plate of the frame with an adapter plate printed in ABS.
Picture: https://drive.google.com/open?id=12lBW03qoFfl-FN4crYKhkePEvaYO6VSq https://drive.google.com/open?id=1RQOzzWU5GV-7tBZq3_5nilg0l5Y7QU6W
thanks.
I thought it might not be necessary due to the already dampened IMUs in the pixhawk 2.
I will try some different mount strategies. Hopefully I will get rid of these clippings - specially the Zaxis.
The PID might also have to be retuned (autotune delivered some very hight STAB-P values).
UPDATE
I have now replaced the folding Props with new T-Motor Carbon 15x5 - no improvement at all.
Then I have mounted the PH2.1 with Gel Cubes 15x5x5mm on the frame and flew a small auto mission. There is an improvement but it is still not ok. So I did a new autotune with the gel cubes and flew the same auto mission.
REMARK: Flight 1 was another day with a lot of wind and the auto mission was a little bigger:
Overview - logs can be downloaded, just click on the link below.
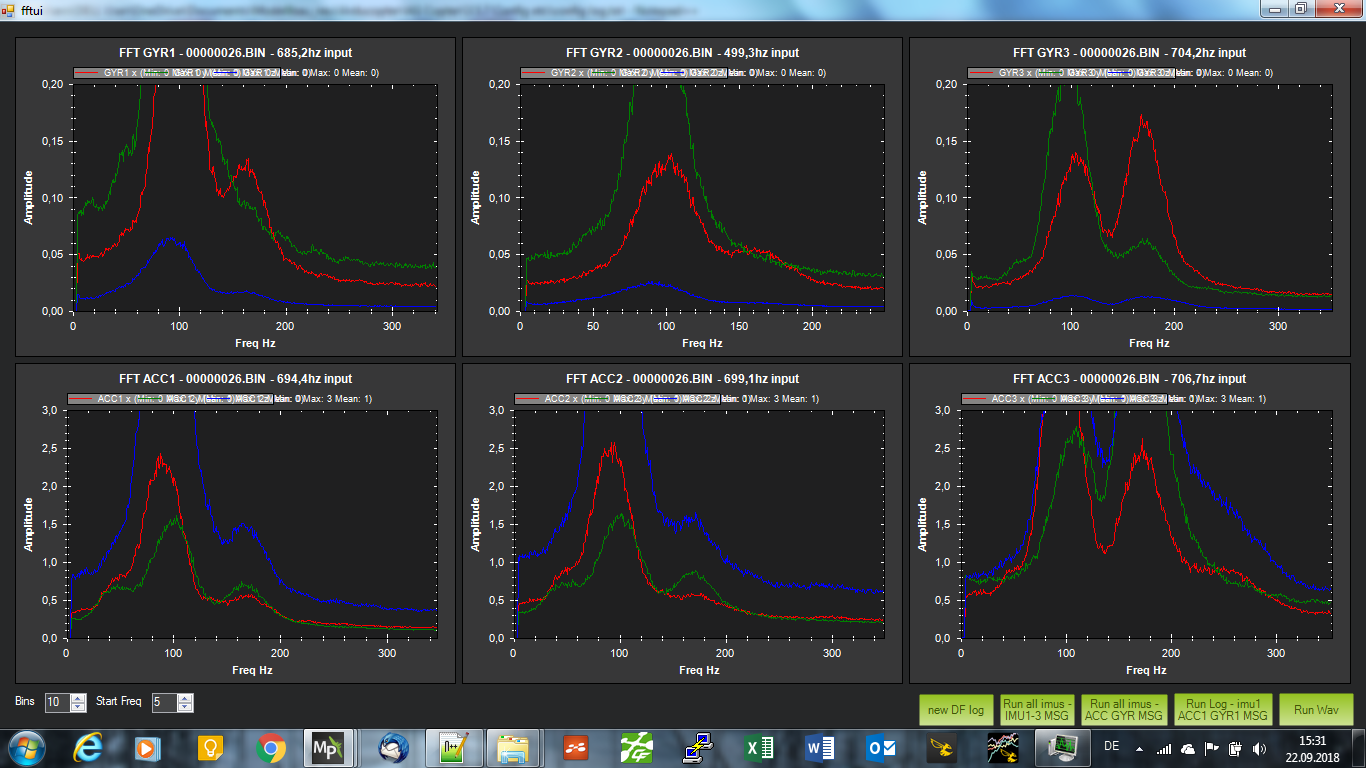
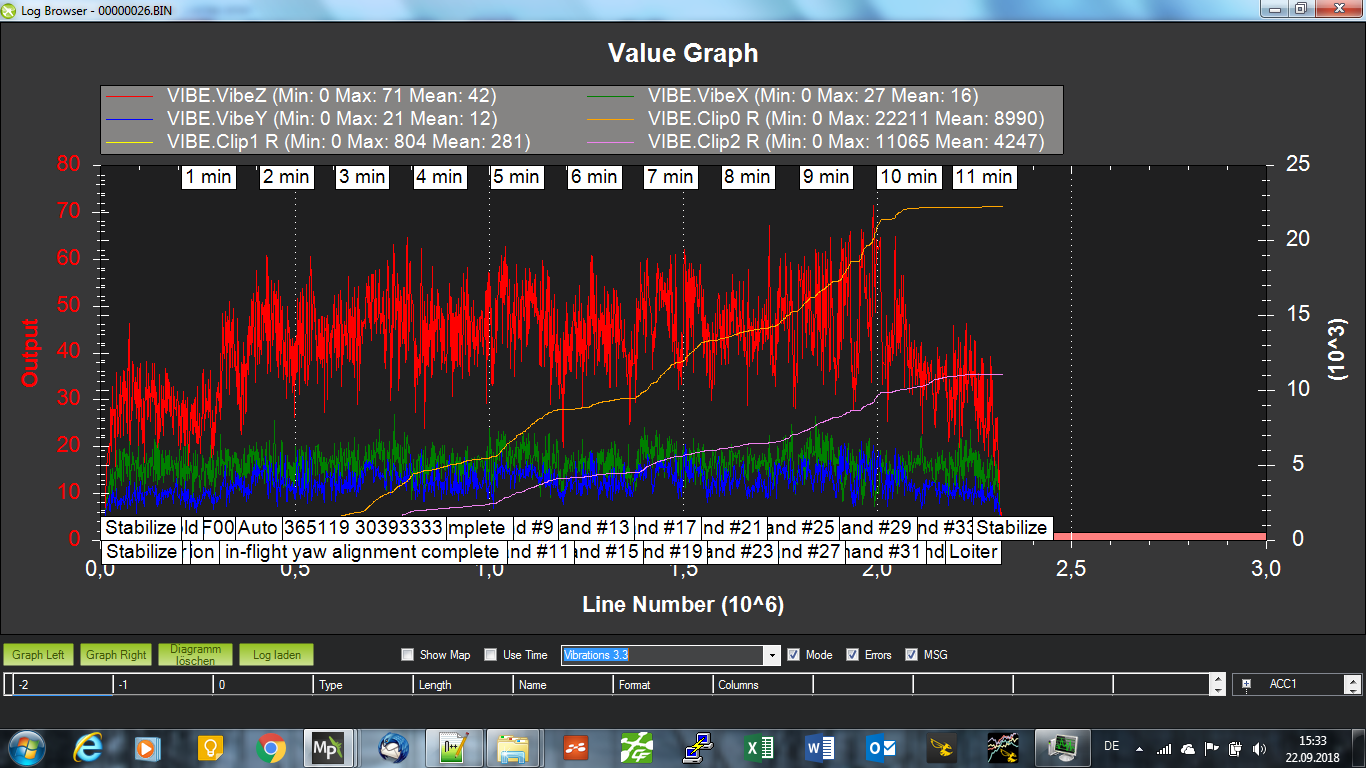
02.09. Flight 1: Log 26: direct mount, windy day, old PIDs
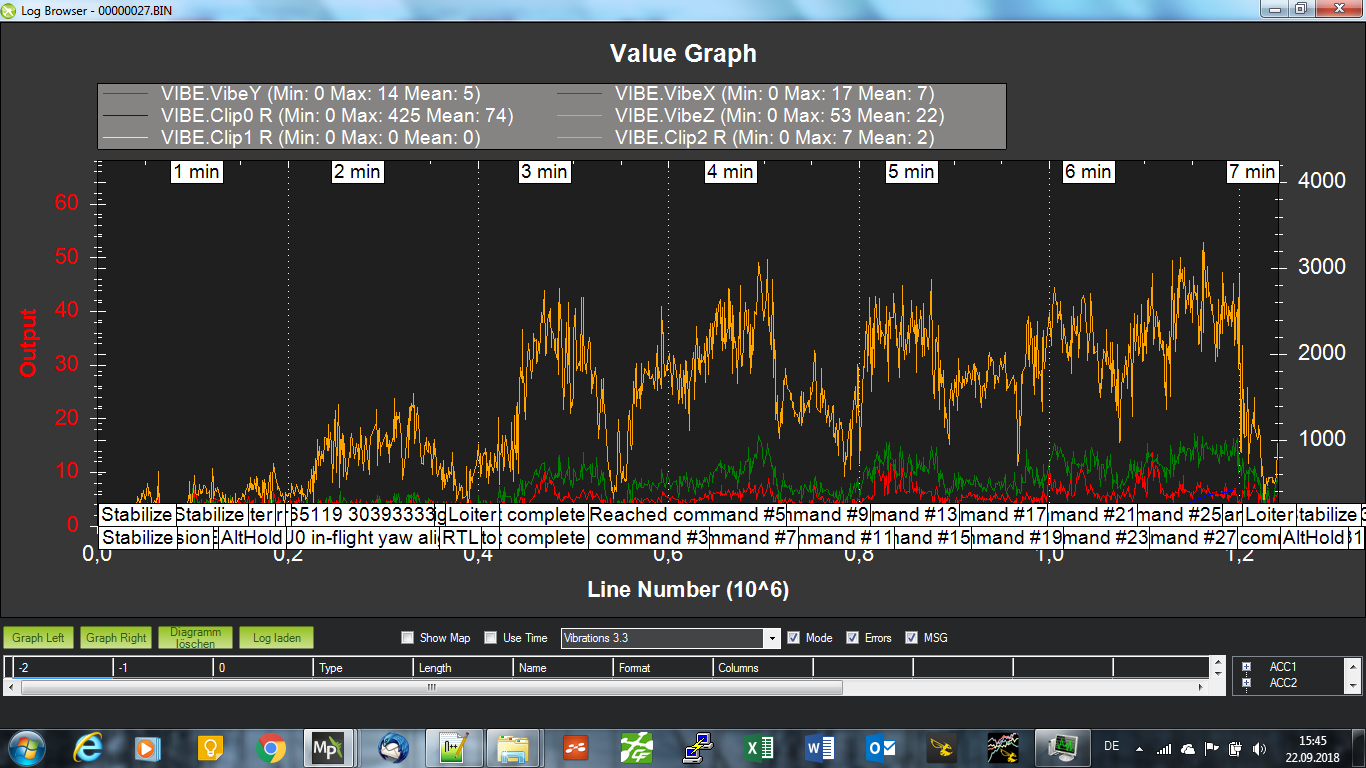
22.09. Flight 2: Log 27: Gel Cubes, no wind, old PIDs
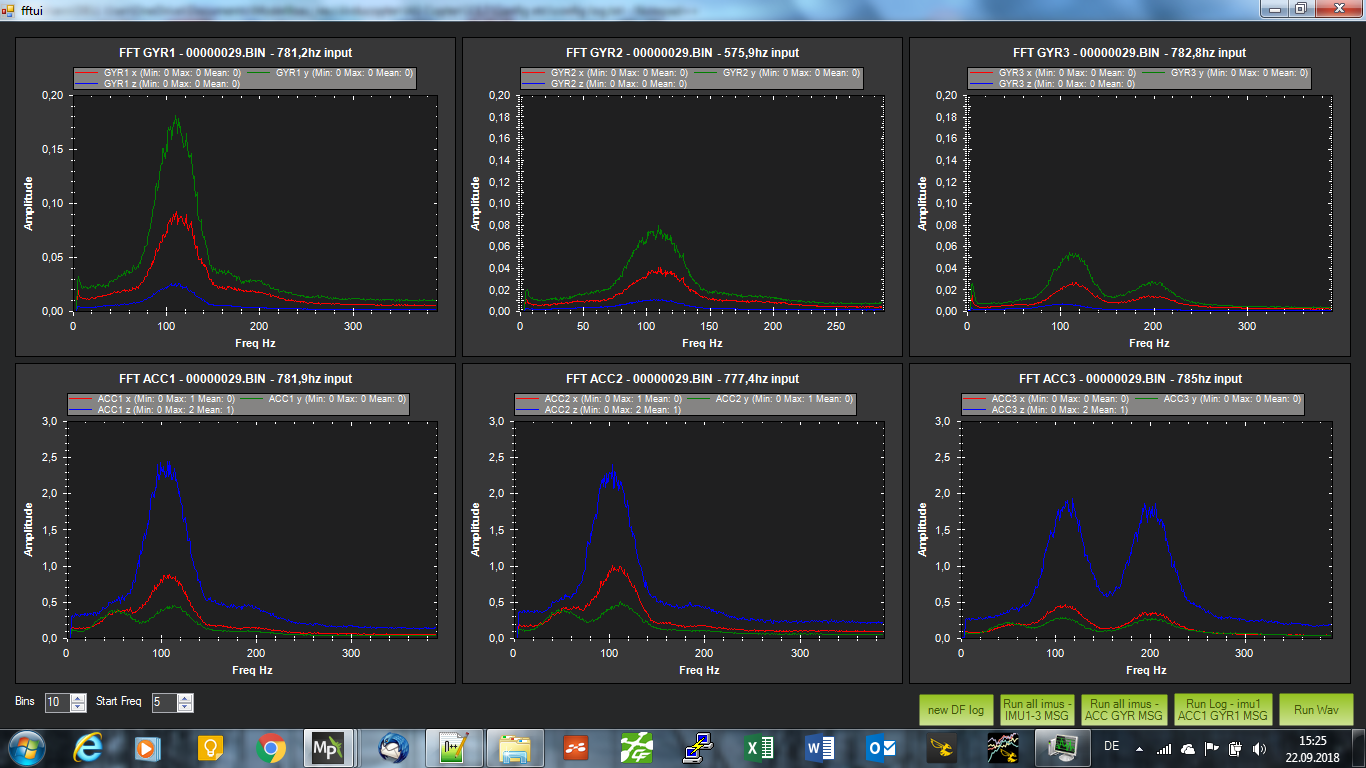
22.09. Flight 3: Log 29: Gel Cubes, no wind, new PIDs
Please note: all autotunes were done with ATC_RAT_RLL_FILT, ATC_RAT_PIT_FILT = 10 hz and AUTOTUNE_AGGR = not changed
So my conclusion are:
Vibration damping with gel cubes does improve the vibrations.
Not optimal PID values can cause Z-Axis vibes.
Of course wind has a big influence - but for the FFT analysis this should not matter.
The self resonance frequency is not affected by the gel cubes but the amplitude gets lower - so the gel cube are a good damping method.
So what do you think about my issue? Should I just go for another frame or go back to the PH 1 or the good old AUAV-X1 which runs great on an old tarot 650 Iron Man frame?
Or should I just try another vibration damping method?
Found out that my two big Helicopters having the same higher than usual in my case Y-vibration with the Pixhawk 2.1.
Tried to find a hardware solutions because I never have seen that with the Pixhawk 1. My mainshaft bearings are expensive ceramic bearings but no difference.
I read that other Heli flyers noticed that the Pixhawk 2.1 is not suitably for Helicopters and swap to the CUAVv5. I regret now to have purchased just recently the two Pixhawk 2.1.
The comment on the 2.1 not being suitable for helicopters is absurd.
the 2.1 gives 3 IMU’s , two of which are isolated, 1 which is not.
this gives you the ability to have tighter gyro coupling from the fixed IMU, and Isolation for the two other Accelerometers.
Running Chibios, you can run all three IMU’s and the EKF will sort it out for you.
Rather than guessing, you are best to run some flights with high speed logging of the three accelerometers, and the three gyros, then do an FFT and get the data you need to make an informed decision.
I found the solution by mounting both 2.1 PixHawk on half inch solid aluminum blocks. The vibrations have been reduced to a usable level this way. I studied what other Heli users experienced, followed recommendations and put up with the extra weight now. And using ChibiOS.