We have fine-tuned a DJI S1000 with Pixhawk 2.1.
It works well, except when we fly in AUTO mode with the “Terrain” Parameter setup in the mission.
In this case Pitch and Roll start oscillating significantly and the altitude changes periodically (as we see from the Rangefinder measurement - it is a Lidar SF20 I2C version); motors seem to work erratically.
If the same mission is flown with “Relative” instead of “Terrain” then the mission is performed quite well.
It happens every time we set “Terrain” instead of “Relative”.
I have seen similar behaviour on one of our 3dr x8 frames, when you say pitch and roll oscillating does the pitch look like, as it’s either climbing or descending it’s rocking back and forth?
Hi MRC87,
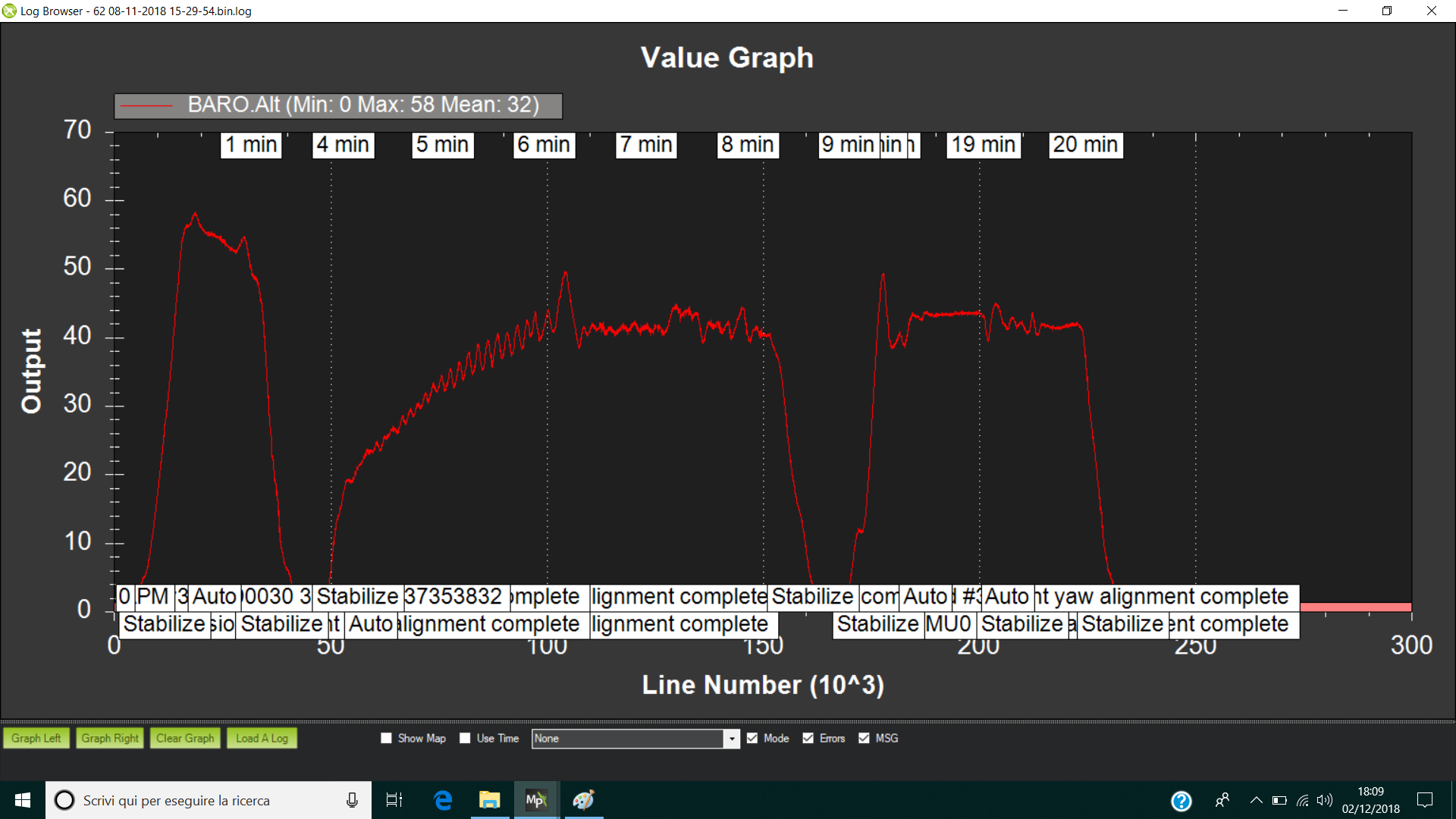
attached are the graphs of the mission.
As soon as the Auto mode with Terrain parameter is engaged you can see the oscillation, the octacopter starts rocking back and forth but anyway proceeding to the waypoint very slowly. You can see the graph, with the command very likely coming from ATT.DesPitch, which is immediately followed by ATT.Pitch; roll is less evident and is probably due to the significant Pitch oscillation.