try to download raw file - it looks like HTML file you have in radio 
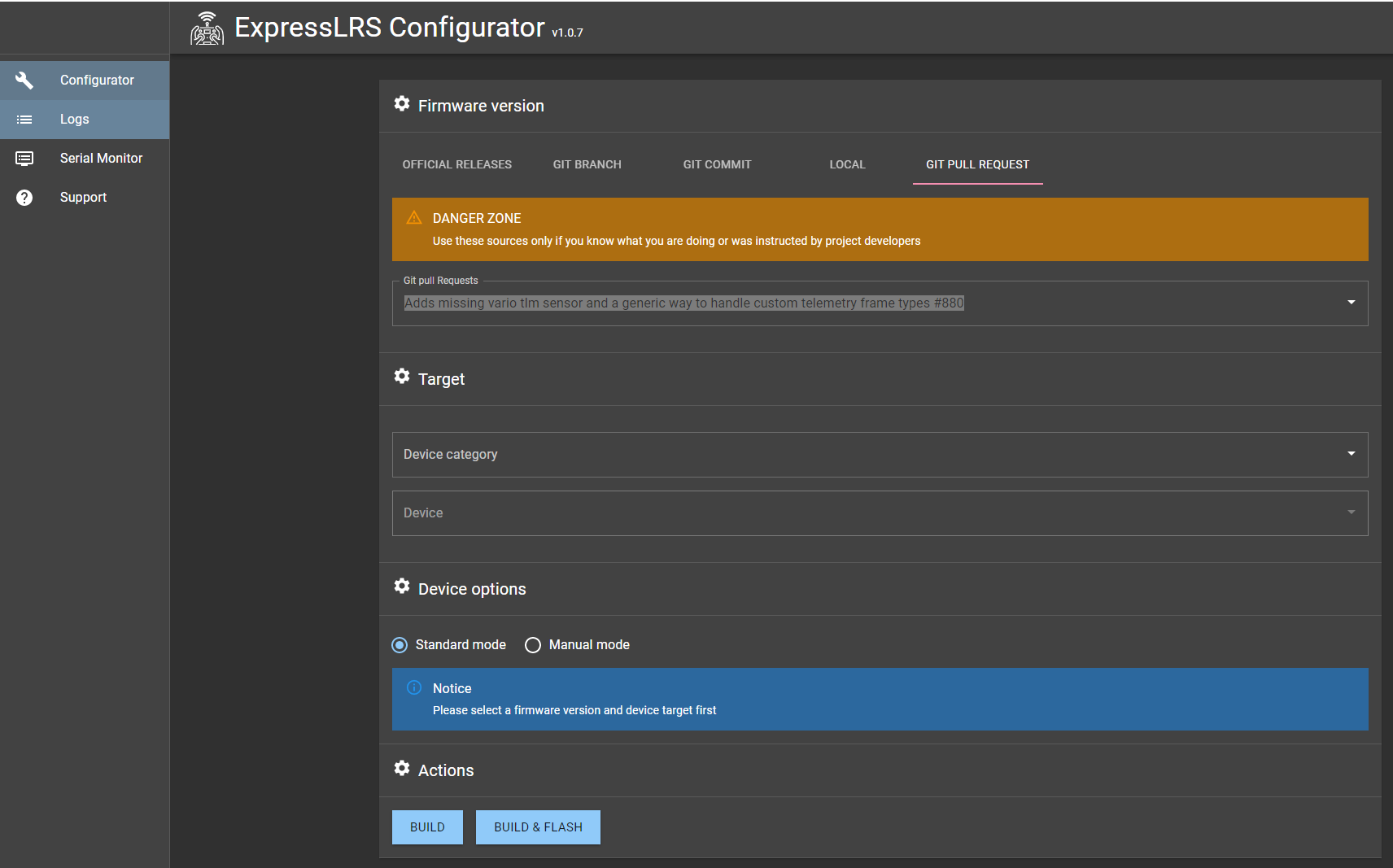
you need to build a test/experimental version of ELRS, this dev branch
Note: please do not ask for help about bulding and flashing ELRS here because is off topic
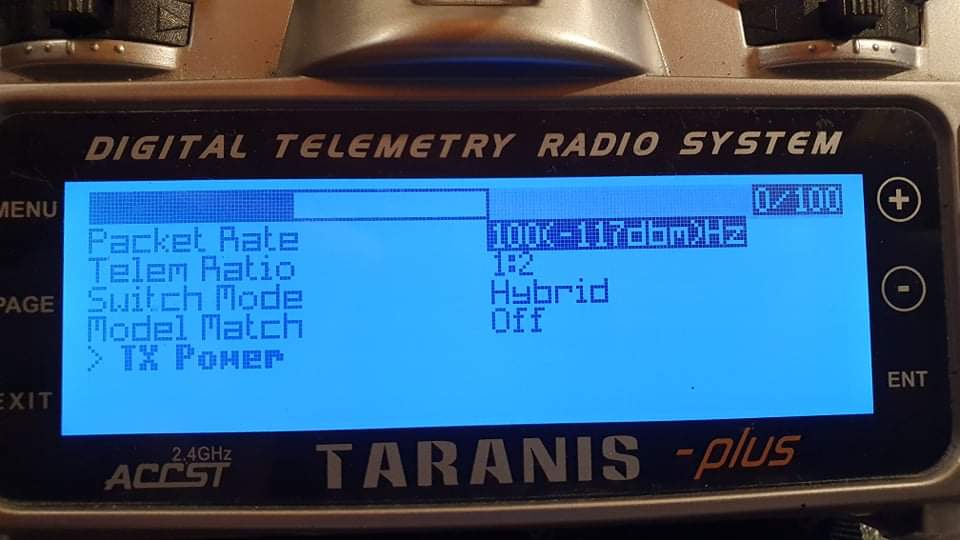
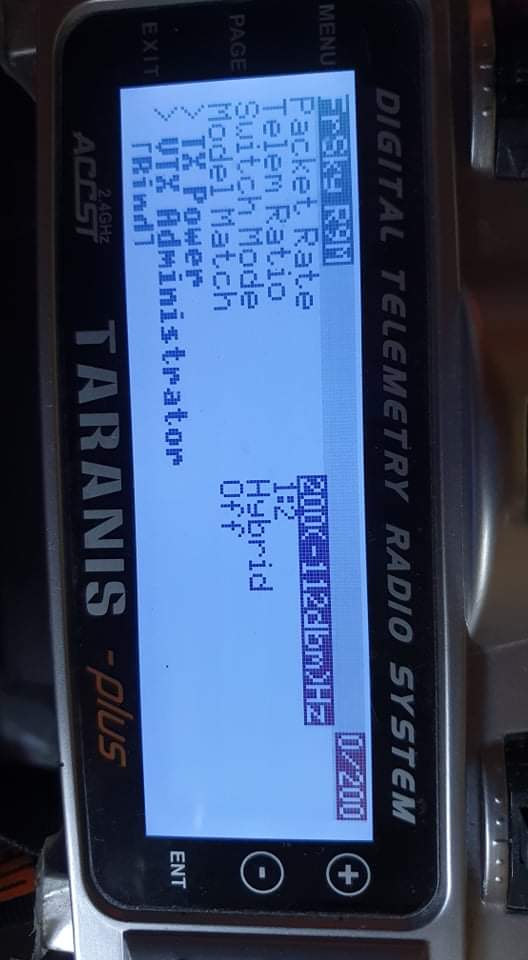
Once you flashed this ELRS dev version select a high telemetry rate of at least 50Hz (i.e 100:2, 200:4,200:2, etc).
Download my latest widget https://github.com/yaapu/FrskyTelemetryScript/archive/refs/heads/dev.zip
Flash ardupilot 4.1 or 4.2
This works on all OpenTX supported radios (ELRS requires OpenTX 2.3.12)
2 Likes
Thanks Alex! It was big push for me in the solution.
Now it works with ELRS and your script together as it should!
The only issues i ve got some telemetry lost/recovered warning…depends on the refresh rate i ve setup 200hz…and 1:4 seems good but not perfect…so i change the Baud of x9d from 400k to 115k…it solved this issue but …now if start the elrs lua…i ve “not enough memory or script panic” messages…and i had to power cycle the radio to make yaapu or any other script work again.
Any suggestion what scripts can i delete to solve this issue…i have copied model also selected yaapu script for my frsky modules…maybe they run in the same time at the background?
Sorry if this also offtopic.
And thanks again for your great help! Im happy as it working again now with my elrs setup
1 Like
Hi, go into the config menu of my script, select “min” for right and center panels and power cycle your radio.
Min panels use less memory and on older X9D ( not 2019) memory is simply too tight.
Yep…i realised it…sorry for newbie things😀…now its working thanks for your advice!
Hi.
Thanks for your reply again. I set up min values for that panels. It s better now but randomly still got errors.
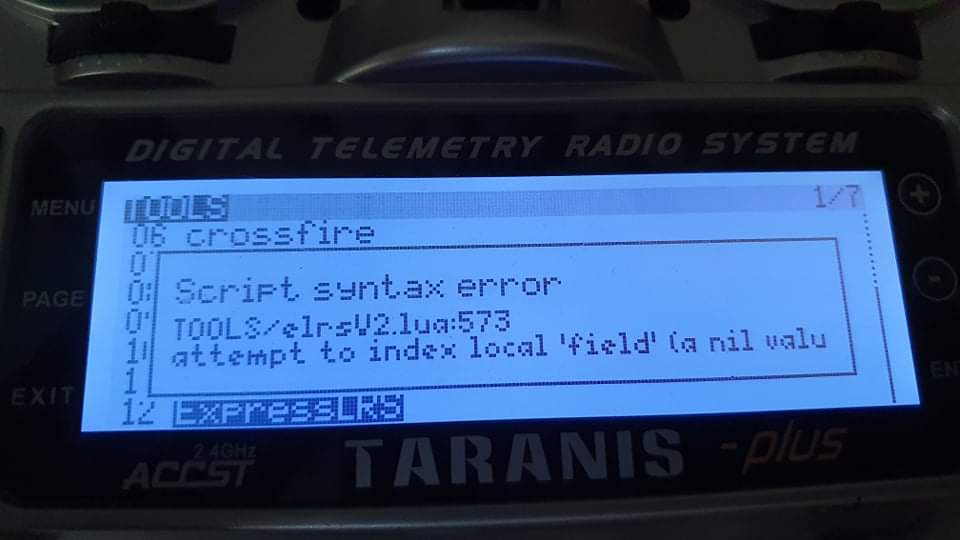
If i start yaapu first it works well…but after i start elrsv2.lua than i received not enough memory error or syntax error nil value messages.
After this error message comes when i starting elrsv2 lua…i can go back and start the yaapu without any issue (and without restart the radio)…so it seems now the elrsv2 lua has memory issues with the radio.
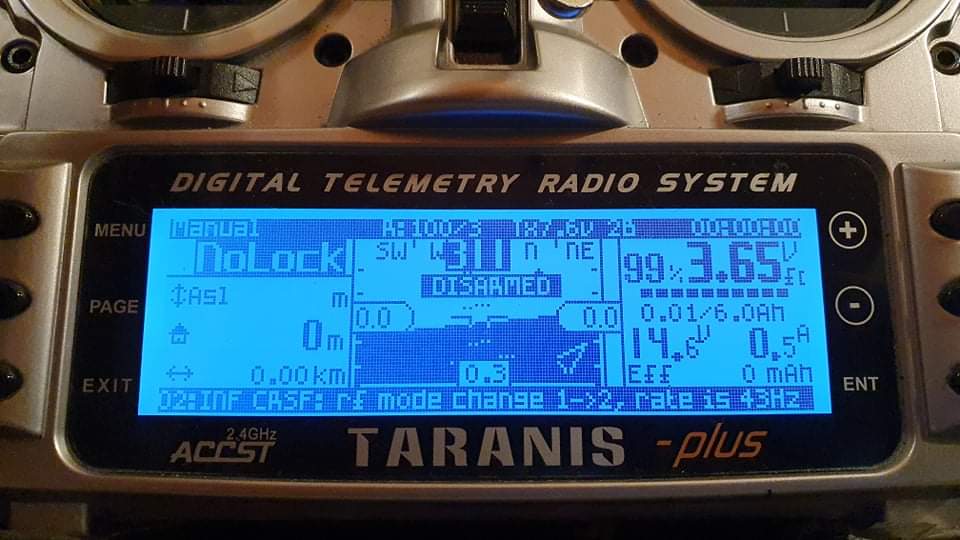
Is it possible to delete some other scripts.(e.g stats, PP, yaapu or other debugs etc??) to free up some memory…but i dont know which starts parallel in the background with yaapu…i post here my taranis display screenshots

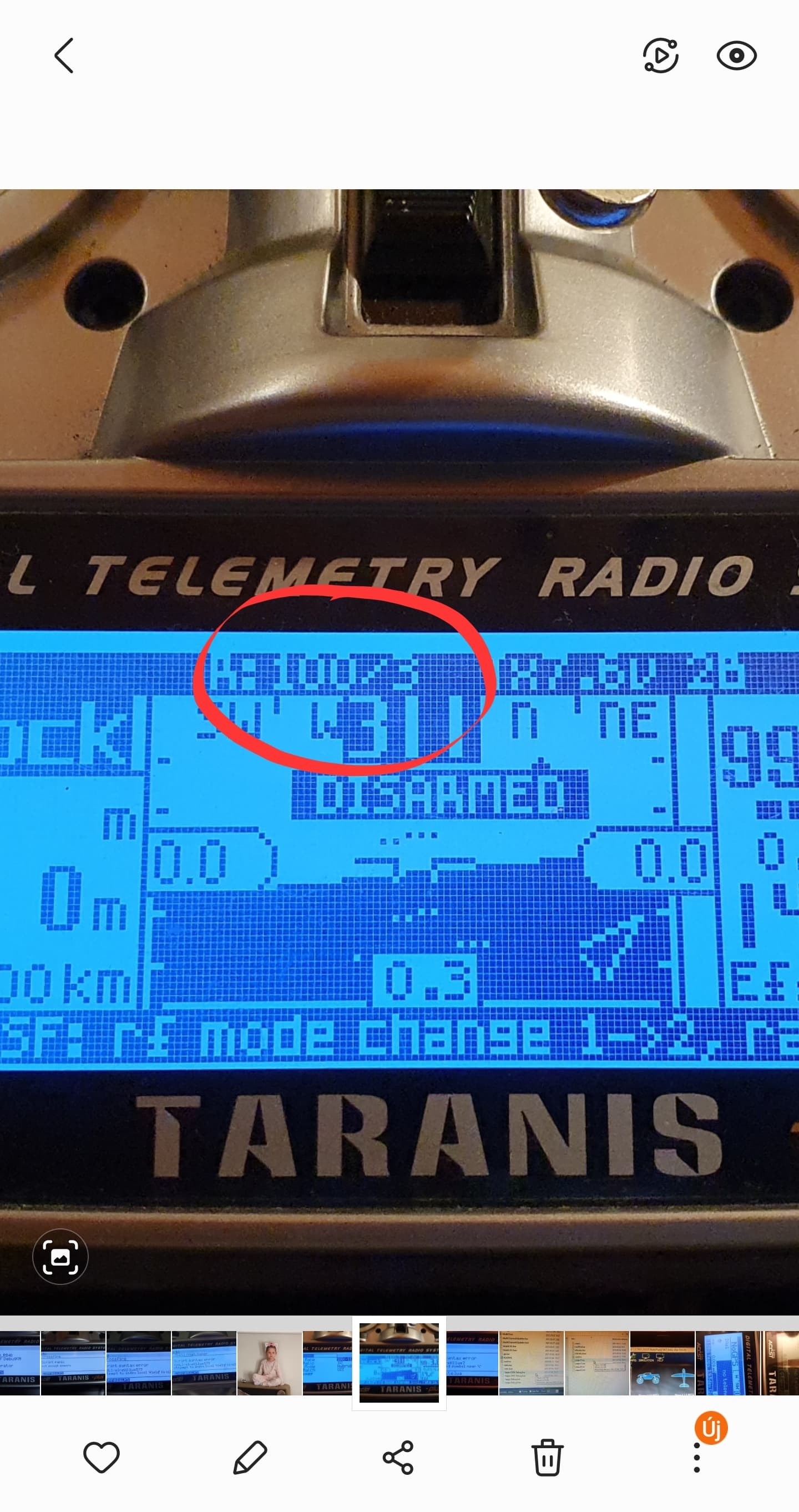
Also i cant see rssi in % or link quality…only R:100/3
Hi, as I already said memory on X9D is tight, unfortunately you’ll have to deal with it, I can’t do much 
Ok…not big issue…now i know how to handle…as i dont need to change between Elrs lua and yaapu in midflight…and if dont start other script before yaapu…it works as it should👍
My only issue remain to see the rssi or the LQ as i wrote in the other thread where you already replied👍
Thanks again
1 Like
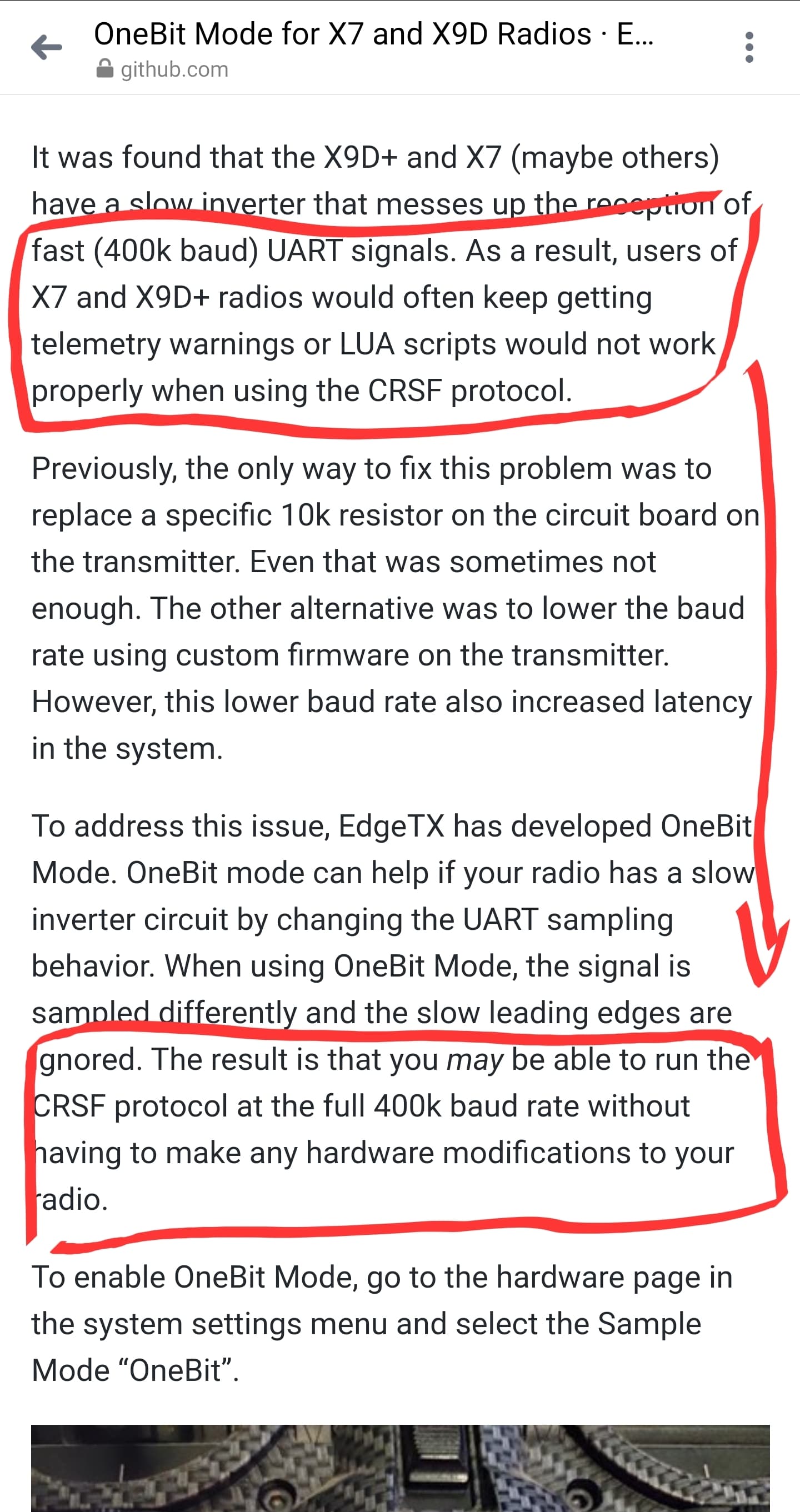
Hi. I bought the CRSF starter kit with micro tx v2 and 3 nano receiver. The kit includes a inverter mod (but the description in package list shows its for QX7 radio) i have 2016 X9D plus taranis. Do i need this mod for passthrough working?? or its only for qx7 OR its enough to use the onebit option ??which now has a feature in edge tx and newer opentx with onebit fw uploaded.
Have you solved the telemetey freeze issues? I wanted to change to crossfire as my R9m.and r9mm system randomly freezed not just inyaapu but the all the sensors incoming to the radio.
1 Like
Hello!
Is it possible to use Yaapu script with an ExpressLRS?
Thanks for explanation.
Hey Alex, Thank you for your hard work on this, I am interested in putting this on a cinematic drone build with , Horus X10, you’re widget and crossfire on a pixhawk BLUE mounted on a KORE…my question is…can i rely on it with an expensive drone and camera setup? should I worry about in-flight reboots?? Im new to pixhawk, in fact this my first time asking, I know I can rely on the STABLE firmware, how much risk should I assume for using " pre-release and “testing” firmwares?? my main concern is " in-flight reboots" and losing the copter???
Thank you for any feedback you can give me
Rick Reed FPV
Carlsbad, CA
I’ve never heard of an in-flight reboot of AP at all, be it in stable, beta, or master, and neither of a lost craft purely due to a bug in AP. That being said, with really expensive equipment I’d probably still wait for CRSF/Yaapu to be in stable, just to fly in a more relaxed fashion and therefore take better shots. 
1 Like
Hi, just scroll up  all the posts before yours are about CRSF and ELRS
all the posts before yours are about CRSF and ELRS
2 Likes
This is not really a question about Yappu passthrough but more about CRSF support in general. CRSF support is new to 4.1 and 4.1 is not yet released (although very, very close). So I would wait for 4.1 to come out before using it on something expensive.
ArduPilot is designed to be reliable - many people rely on it to keep their very expensive copters safe - and although problems do occur they are few and far between for stable releases.
1 Like
I’m having a weird problem on a plane that worked fine until the day before yesterday - I didn’t update or change any settings. Symptoms:
- I’m getting (temporary) radio failsafes every time I connect the battery (= receiver powers up), and it looks like it might be related to CRSF.
Three examples (recorded at home, since I had log while disarmed disabled in the field):
10/10/2021 00:43:52 : CRSFv3: RF mode 2, rate is 160Hz
10/10/2021 00:43:48 : GPS 1: detected as u-blox at 230400 baud
10/10/2021 00:43:47 : CRSFv3: RF mode 2, rate is 129Hz
10/10/2021 00:43:44 : RunCam initialized, features 0x0077, 2-key OSD
10/10/2021 00:43:42 : RunCamOSDControl MIDDLE
10/10/2021 00:43:42 : RunCamControl LOW
10/10/2021 00:43:42 : Failsafe. Long event off: reason=3
10/10/2021 00:43:42 : CRSFv3: RF mode 2, rate is 1Hz
10/10/2021 00:43:42 : Throttle failsafe off
10/10/2021 00:43:42 : CRSF: custom telem init done, fw 6.07
10/10/2021 00:43:42 : RCInput: decoding CRSF
10/10/2021 00:43:42 : CRSF: requesting RX device info
10/10/2021 00:43:40 : IMU0: fast sampling enabled 8.0kHz/1.0kHz
10/10/2021 00:43:40 : RCOut: DS600:1-2 PWM:3-4 NeoP:5-6 PWM:7-10
10/10/2021 00:43:40 : MatekF405-Win 00230032 54535006 2034394
10/10/2021 00:43:40 : ChibiOS: 4e053f70
10/10/2021 00:43:40 : ArduPlane V4.2.0dev (5f980929)
10/10/2021 00:41:02 : CRSFv3: RF mode 2, rate is 160Hz
10/10/2021 00:40:59 : GPS 1: detected as u-blox at 230400 baud
10/10/2021 00:40:57 : CRSFv3: RF mode 2, rate is 128Hz
10/10/2021 00:40:53 : RunCam initialized, features 0x0077, 2-key OSD
10/10/2021 00:40:52 : RunCamOSDControl MIDDLE
10/10/2021 00:40:52 : RunCamControl LOW
10/10/2021 00:40:52 : Failsafe. Long event off: reason=3
10/10/2021 00:40:52 : CRSFv2: RF mode 2, rate is 1Hz
10/10/2021 00:40:52 : CRSF: custom telem init done, fw 6.07
10/10/2021 00:40:52 : Throttle failsafe off
10/10/2021 00:40:52 : RCInput: decoding CRSF
10/10/2021 00:40:52 : CRSF: requesting RX device info
10/10/2021 00:40:48 : IMU0: fast sampling enabled 8.0kHz/1.0kHz
10/10/2021 00:40:48 : RCOut: DS600:1-2 PWM:3-4 NeoP:5-6 PWM:7-10
10/10/2021 00:40:48 : MatekF405-Win 00230032 54535006 2034394
10/10/2021 00:40:48 : ChibiOS: 4e053f70
10/10/2021 00:40:48 : ArduPlane V4.2.0dev (5f980929)
10/10/2021 00:47:14 : CRSFv2: RF mode 2, rate is 1Hz
10/10/2021 00:47:14 : RunCamOSDControl MIDDLE
10/10/2021 00:47:14 : RunCamControl LOW
10/10/2021 00:47:14 : Failsafe. Long event off: reason=3
10/10/2021 00:47:13 : CRSF: custom telem init done, fw 6.07
10/10/2021 00:47:13 : Throttle failsafe off
10/10/2021 00:47:13 : RCInput: decoding CRSF
10/10/2021 00:47:13 : CRSF: requesting RX device info
10/10/2021 00:46:56 : Flight mode = 11
10/10/2021 00:46:56 : Failsafe. Long event on: type=2/reason=3
10/10/2021 00:46:55 : IMU0: fast sampling enabled 8.0kHz/1.0kHz
10/10/2021 00:46:55 : RCOut: DS600:1-2 PWM:3-4 NeoP:5-6 PWM:7-10
10/10/2021 00:46:55 : MatekF405-Win 00230032 54535006 2034394
10/10/2021 00:46:55 : ChibiOS: 4e053f70
10/10/2021 00:46:55 : ArduPlane V4.2.0dev (5f980929)
-
Just like with the still unresolved (by TBS) Diversity Nano RX CRSFv3 baud rate switching bug, RC in some cases just freezes. Red frame around Yaapu widget and no more messages coming in, and no control of the plane either. Luckily this happened just before launch and not after.
-
There were also some instances were the RX LED remained red, yet the Crossfire module claimed to be connected. Of course, when trying to launch Agent Lite, it was unable to retrieve any settings.
I then flew another craft with a Nano RX, and there were no oddities at all. That one was a copter though, running a slightly older master version.
Maybe a broken RX can’t be ruled out either…
Hi!
Just checked.
Everything works nice with both crossfire and elrs.
Can you please tell me what will give me better range (both control and telemetry): cross or erls?
Thanks!
Hi, glad you had it working!
Range is quite subjective, you’ll have to experiment yourself and if you feel like it come back here and share your findings 
1 Like
So my guess is that this is a DMA delay at startup - something else probably sharing the DMA channel and hogging it at startup. I get this on my new H7 at startup, but then its fine after that (poor range but that’s another story).
1 Like
Very weird, how can something like this appear out of the blue, with no changes being made for a month? Usually in such a case my first guess would be broken hardware, but there were no hard crashes or anything either. Well, I’ll just try updating to the latest master and see if it goes away.
EDIT: I just noticed the same FS now actually happens even when just connecting USB, meaning the RX is not even powered on yet.
EDIT2: This is really the most bizarre thing - RC and Yaapu are lost again after a while on the bench, plane goes into RTL (visible on NTF display), but the Crossfire link seems to keep on going and not even notice anything special. I can even access both TX and RX via the joystick on the module and even change VTX settings via SA (direct connection RX-VTX) - all while there is no RC. When turning of TX, “receiver is still connected”. When turning it back on, RC is still not restored however. So the plane would be circling until the battery dies, with no way to restore control, although the Crossfire link is still active.
Still suspecting a hardware failure, I tried another Nano RX from an unfinished plane, with some success it seems: RC and Yaapu have been running for about 15-20 minutes without freezing. The failsafe message still appears but not at every boot.
The only difference, other than it’s a different RX, is at that I don’t have anything else connected to the RX, just TX and RX. Will check if the problem stays away when I reconnect SA to VTX and PWM CH7 to cam switcher.
EDIT: Still seems solid with those two other cables connected. So it really looks like the first Nano RX is broken.