I’m new to Ardupilot but making great progress with your kind assistance - thank you! Here are my new questions:
Is it possible to send telemetry (more specifically - GPS coordinates) to QGroundControl/MissionPlanner/etc. from my Jumper T18 transmitter that is connected via USB to laptop, so I can see copter’s movement on the map?
I am about to buy a new receiver. After checking different devices I came to the following two options, which one would you recommend to achieve the above task?
How should I configure Jumper T18 so it transmits GPS coordinates (that it gets from the drone) to the QGroundControl over USB?
Jumper R900’s specs state in Features section that it has “Telemetry TX/RX port enabled. (for PIX telemetry)” - what’s that? Does Ardupilot supports this PIX telemetry? And does it send GPS coordinates to the Transmitter?
My flight controller is Eachine’s clone of Matek F405… it doesn’t have pmw outputs… that’s why I want to use a receiver for this (since I need to buy a new receiver anyway). So is it OK?
1a. I prefer to use what I already have and must use anyway - that is my Jumper T18…
1b. I prefer to see the map on my laptop, not radio… but it is a nice option to know about…
Could not understand what did you mean by that reference?..
I’ve used the R9 not the R900, but it appears to me that they are the same beast, just different frequency ranges.
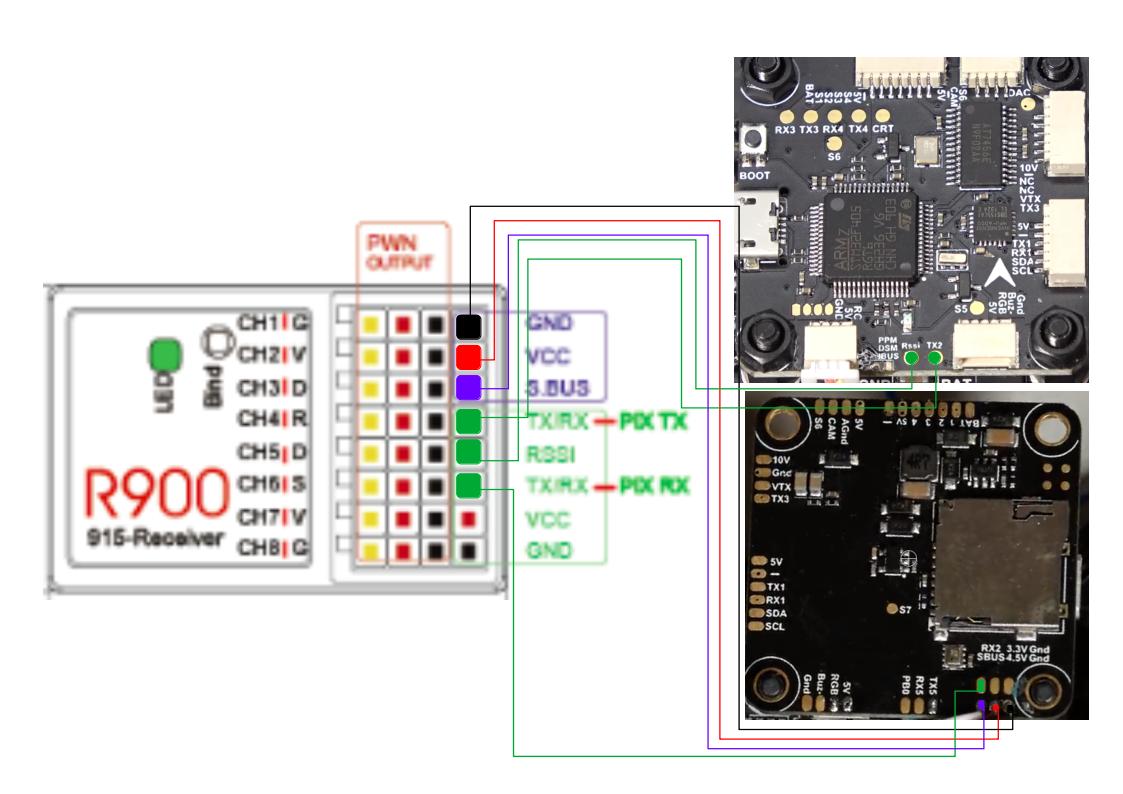
So, you will need to connect the TX/RX pins to an open serial port on your controller (A different port than you are using for your SBus signal). I set the serial port to FrSky serial passthrough then run Yaapu telemetry on my TX16S. SERIALn_PROTOCOL = 10.
Don’t worry about Fport, I don’t know if those Rx’s support that. The Frsky R9’s do. Sport on these is labeled as telemetry but I was referring to the fact you need an inverter for most F4 boards.
I’ve been out to about 500m with it. It was ideal conditions, but at that range I didn’t have any trouble.
I don’t know this clone board, but you won’t be able to use the RX2/TX2 for the telemetry if you’re using the SBUS (which you should be). Move the TX/RX lines to another free serial port, like TX4/RX4. I also don’t use the RSSI pin.
500m is probably not the limit of an 915MHz receiver. It is advertised it can be used in 10km range. Is it true? Could somebody indeed achieve such range with FrSky R9?
Ok. I’ll use TX4/RX4. But will I be able to use both - SBUS and RSSI as shown above?
Am I correct that it is merely a matter of software patch? When flight controller is attached to the laptop via USB it exposes its GPS coordinates to the QGroundControl and can be seen on map. With working telemetry Jumper T18 has that very same location information and needs just to expose it via USB the same way the flight controller does. Or do I miss something?
Strange that it wasn’t implemented as this would enable you to use your existing hardware, that you anyway must use and get additional functionality of those telemetry radios mentioned by @OldGazer (saving money, weight and battery time)…
Not that I’m aware of. It may be easier to implement on the Radiomaster which has 2 UARTS on the bottom. But even that radio doesn’t have this functionality.