See the other discussion on accel and gyro filters…
INS_ACCEL_FILTER should be left at 10 as you had it.
I incorrectly assumed it should be set to the very old default of 20.
I obviously have a lot to learn still about control loops and filters. The concepts aren’t difficult - but the information about them is pretty sparse. Seems like most of my learning occurs during troubleshooting sessions such as this. It makes me feel guilty that I haven’t done my homework first.
Hi Joseph.
If you have time it would be good to set
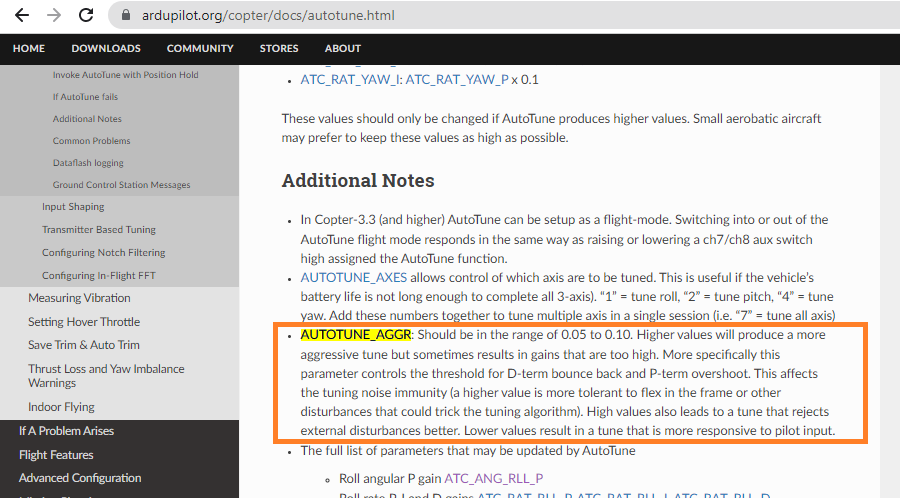
AUTOTUNE_AGGR,0.05
INS_ACCEL_FILTER,10
and I’ll be very interested to the differences another Autotune makes
This copter is neither large - and pilot responsiveness would be a good thing.
Late last week I reset INS_ACCEL_FILTER back to 10. I did a little test flight in my yard checking out the “snappiness” of the latest tune. I like it.
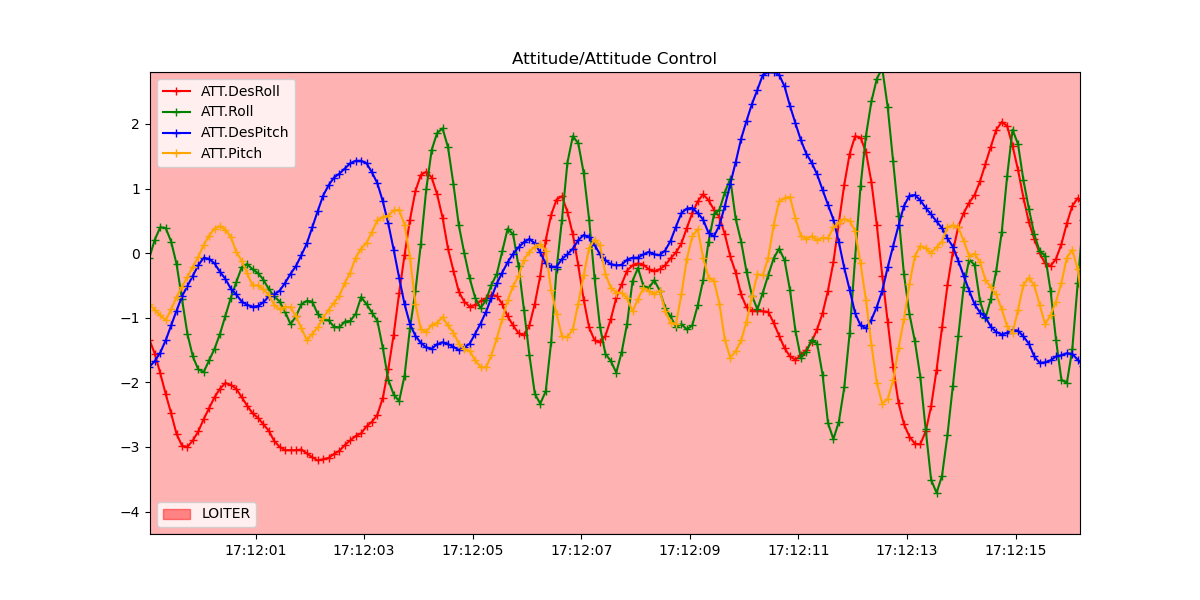
One issue however was when rapid changes for and aft in pitch, the copter would oscillate perceptibly in it’s transition. The stick movements were aggressive - so might not be apparent in normal operation.
I’ll be looking to eliminate these oscillations in subsequent tunes.
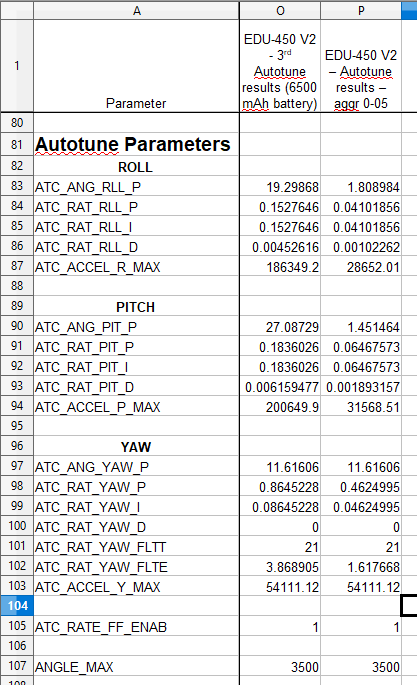
The resulting PIDs however were so “mushy” that the on a subsequent test flight the copter got into an unrecoverable roll oscillation that the copter crashed. Fortunately, no lasting damage.
I’m thinking that tomorrow I’ll re-set the PIDs back to what I had - and autotune again with the AUTOTUNE_AGGR parameter set to 0.075 - the mid-point of it’s range between 0.1 and 0.05.
Looks fairly common for low (.05) Autotune aggression to me. We see this reported often enough with some reported crashes. Those resulting Rate P&I’s are suited to a high thrust/weight mini quad.
Based on the discussion about Accel and Gyro filters, it was suggested 0.05 was good with low vibration/noise levels. 0.1 Autotune aggressiveness was to cope with the presence of undue noise.
It’s possible I’ve misinterpreted what had been said, and I’m sorry it caused you extra work and expense.
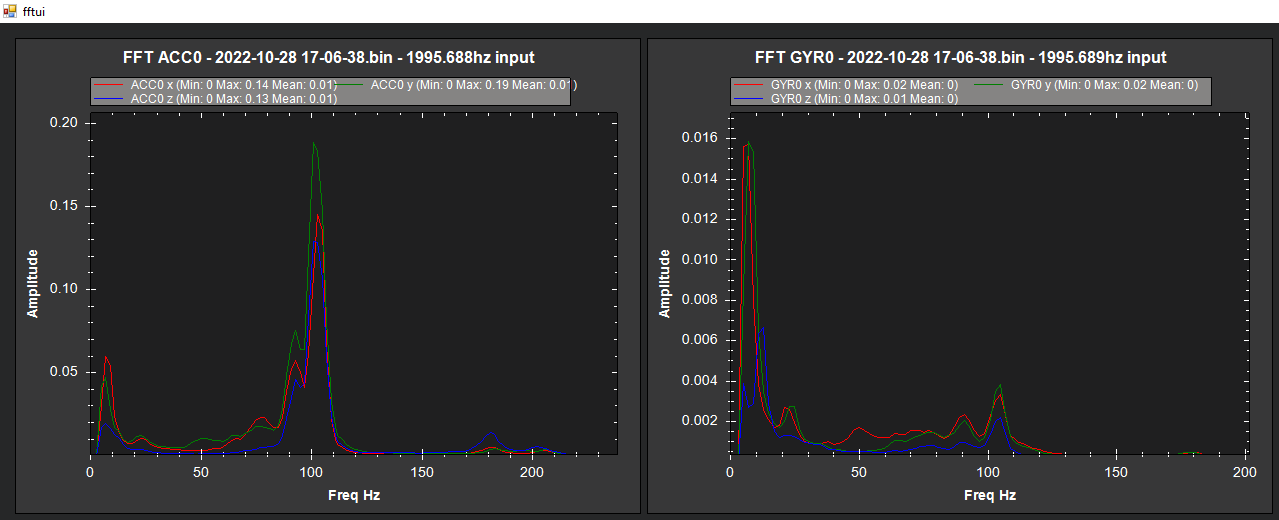
Remember to check the noise levels under the RATE category on the log file.
The RATE.Rout, Pout, Yout, and Aout. These should ideally be below 0.1 in the log if I understand correctly. If not, the gyro and rate filters probably needs to be lowered.