I have a quadcopter “Tyro129” with “MATEK-F405” board and in this post -On a low-cost/mid range FPV Arducopter , there is a list of parameters that I need to define, but I have two problems:
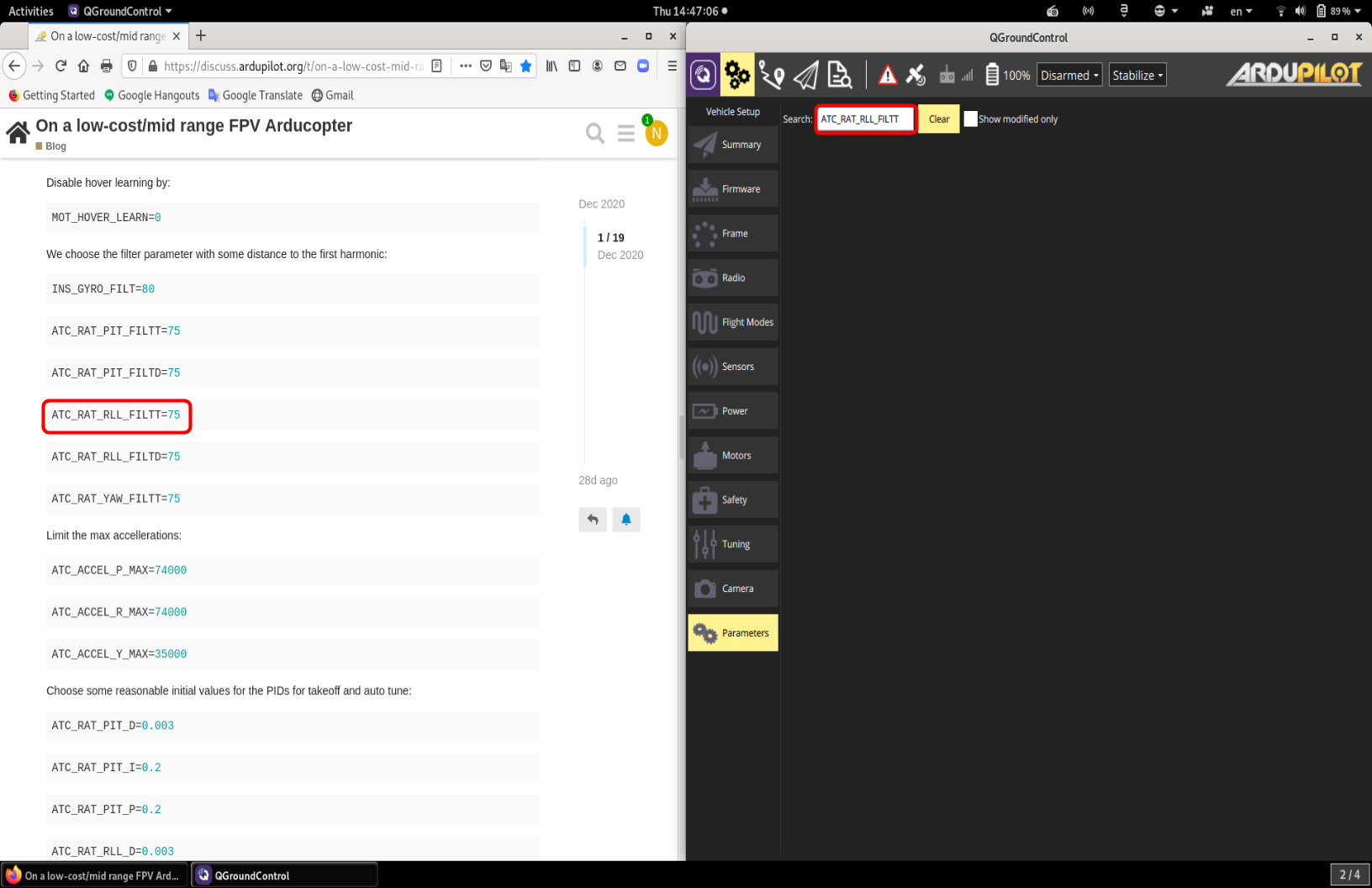
In this list, some parameters have value higher than I can enter, for example:
Are those changes in the names and ranges of those parameters due to version upgrade?.. I doubt it, because I took exactly the version that the author of the post has mentioned (4.0.0), and also two other versions (4.0.5 and 4.0.2).
Or maybe there is another reason?.. And how should I convert those parameters values to fit into the ranges in my current firmware?
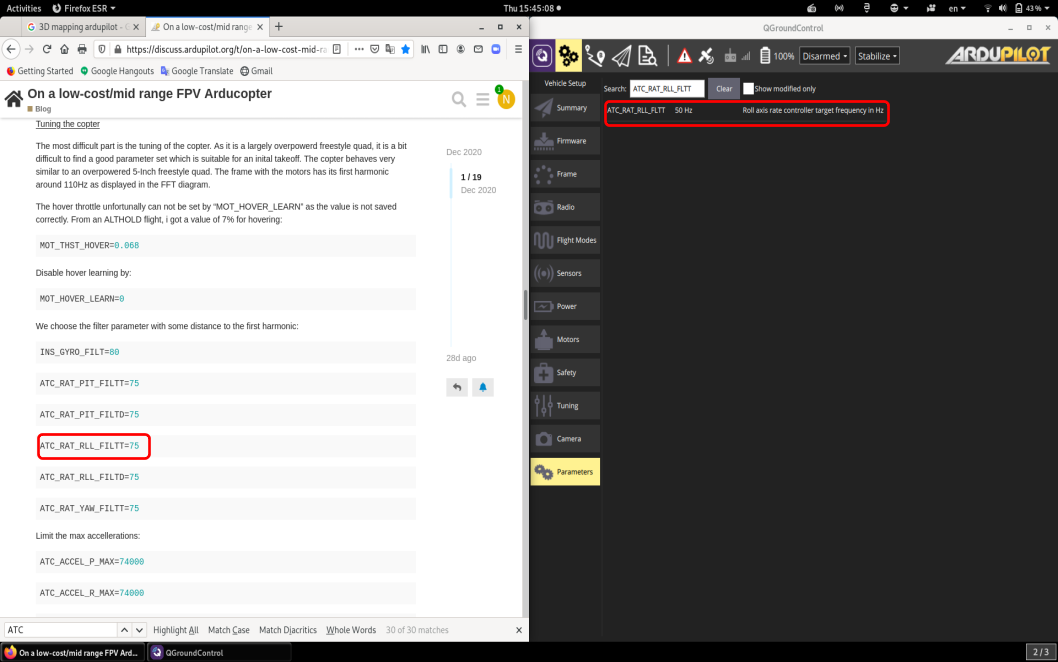
My guess is that ATC_RAT_RLL_FILTT is just a typo. I think you have the right parameter.
The recommended values are just that, recommended. You can exceed them if you know what you’re doing. If QGC won’t let you then you may need to use Mission Planner.
It looks like the ranges mentioned in the UI are not recommended ranges but rather min and max allowed values, i.e. I really should not deviate from it. See in my first picture above the ATC_ACCEL_R_MAX parameter. The QGC says that its allowed range is between 0 and 180000 . But the author suggest to enter a much higher value.