Hi,
I’ve a problem with choosing the correct PID for the hexacopter (I’m using VRBrain 5.2), because if I increase the P the motors starts to overheat, and if I decrease P the hexacopter stays unstable and starts to go up and down without any command. Could you please help me? What would be the best values of PID to start?
Thanks
The PID values depend on the motors/esc/batery/frame and on the controller structure.
The amount of information you provide is not enough.
Sorry for that @amilcarlucas.
answering to your questions:
6x MK3638 (mikrokopter)
6x afroesc 30A
2x maxamps 8000mAh 4S - burst 150A
or
2x Multistar High Capacity 4S 8000mAh - burst 20C
frame - carbon fiber hexa frame - 1,5kg
We are using X configuration.
thanks
anyone has any clues?
attached the logs of 3 “flights” we had, with increasingly high STB PIDs.
we are able to level the drone with high STB PIDs (Around 12) but this causes the motors to overheat.
any clues??
links for 3 of our logs:
Have you tried lowering your D value? Generally it is the one most associated with overheating, as it can cause the flight controller to demand very high frequency throttle changes.
thanks @Anubis
our pid values are really low now
Proporticional is 0.15
integral is 0.1
derivative is 0.04
everything depends on the scale, but i think the value is really low. isnt it?
your motors can give very fast response so try to lower I
we changed the PID values to P: 0,15 I:0,002 D:0,0004. i noticed something very weird when trying to fly it, the roll is much more responsive in one direction than to the other. @bluuu and @Anubis cloud you help me?
We have noticed other problem. On FailSafe menu when we increase throttle, all motors start at the same PWM, but few seconds later it starts to change is values with a difference about 200 or 300 or more between them, ie. the value of Servo/Motor OUT 1 is 1538 and the value of Servo/Motor OUT 2 is 1000. It’s that normal? The test was made with propellers off.
I haven’t used the failsafe menu, so I’m not exactly sure how it works, but such a PWM difference could be normal if the copter is trying to stabilize itself. Try moving it around with your hands - if the PWMs change relative to each other, then it’s just the flight controller trying to level the aircraft.
As for your mysterious roll issue, the only thing I can think of is a weight imbalance or motors not being level.
Your frame is either unbalanced or you have a sick motor on the #2 arm or a badly calibrated ESC.
This would explain why your roll response is different one way.
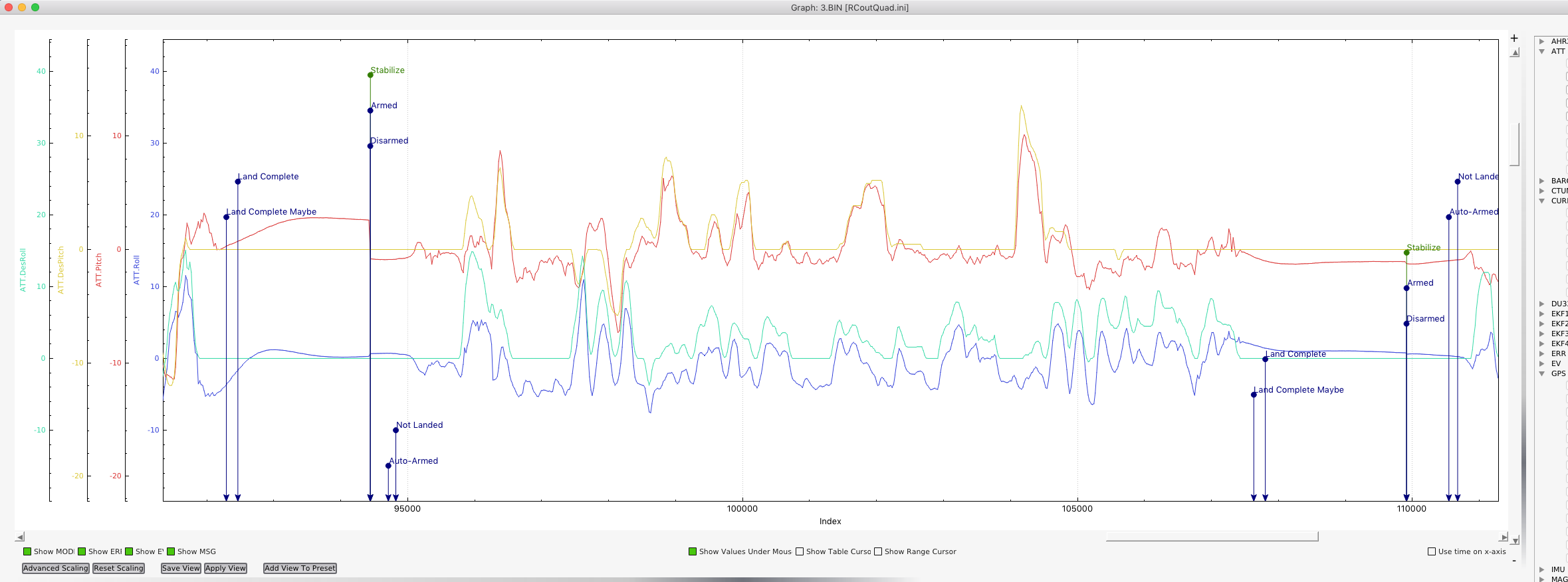
Have a look at the RCOut values.
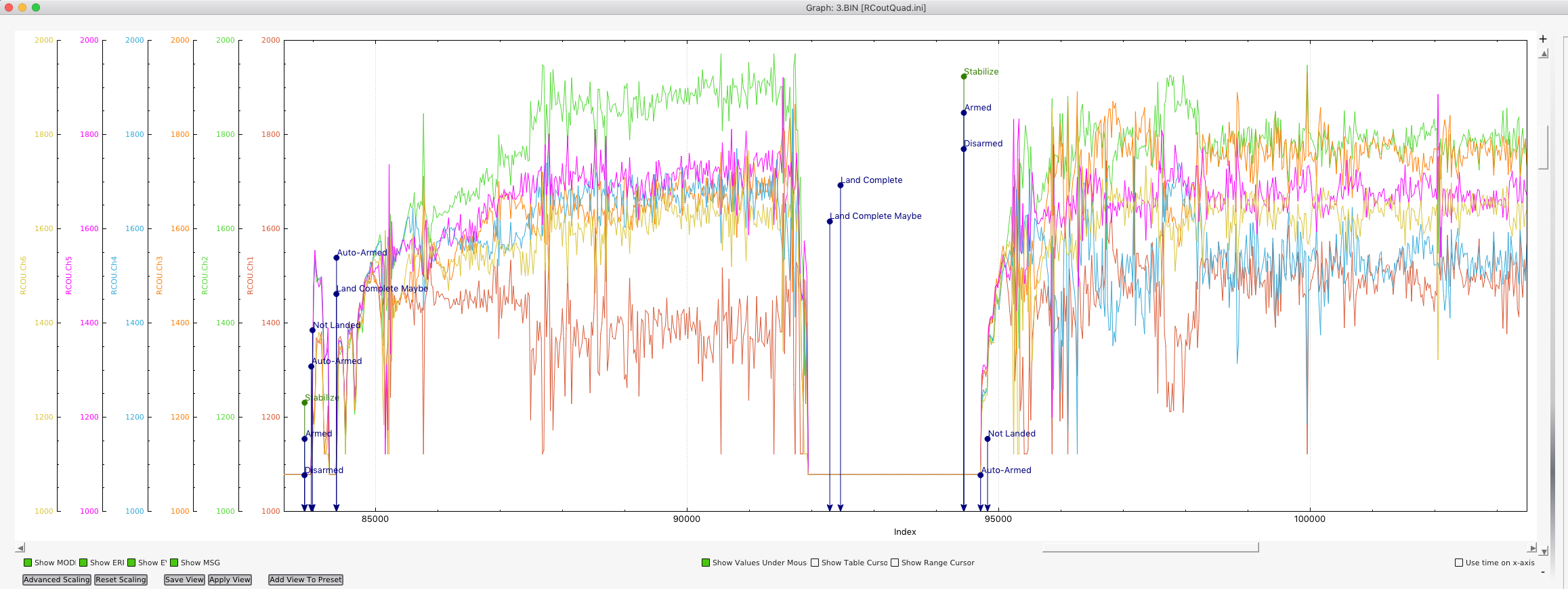
The frame response does not follow the Desired response very well especially in roll showing the imbalance between motors.
Have you autotune?
But I would definitely fix motor #2 first.
Hi @mboland, we changed the esc of the #2 arm and now we can lift the copter well. We still need to correct pitch and roll continuously, if we lift up the copter he goes back, but if we correct the pitch/roll it stabilizes and stays leveled on the right position.
Your frame still looks unbalanced.
Have you balanced it?
This would explain the pitch on takeoff.
@mboland we have tested the frame balance and it seems ok.
we think that esc´s could be the issue.
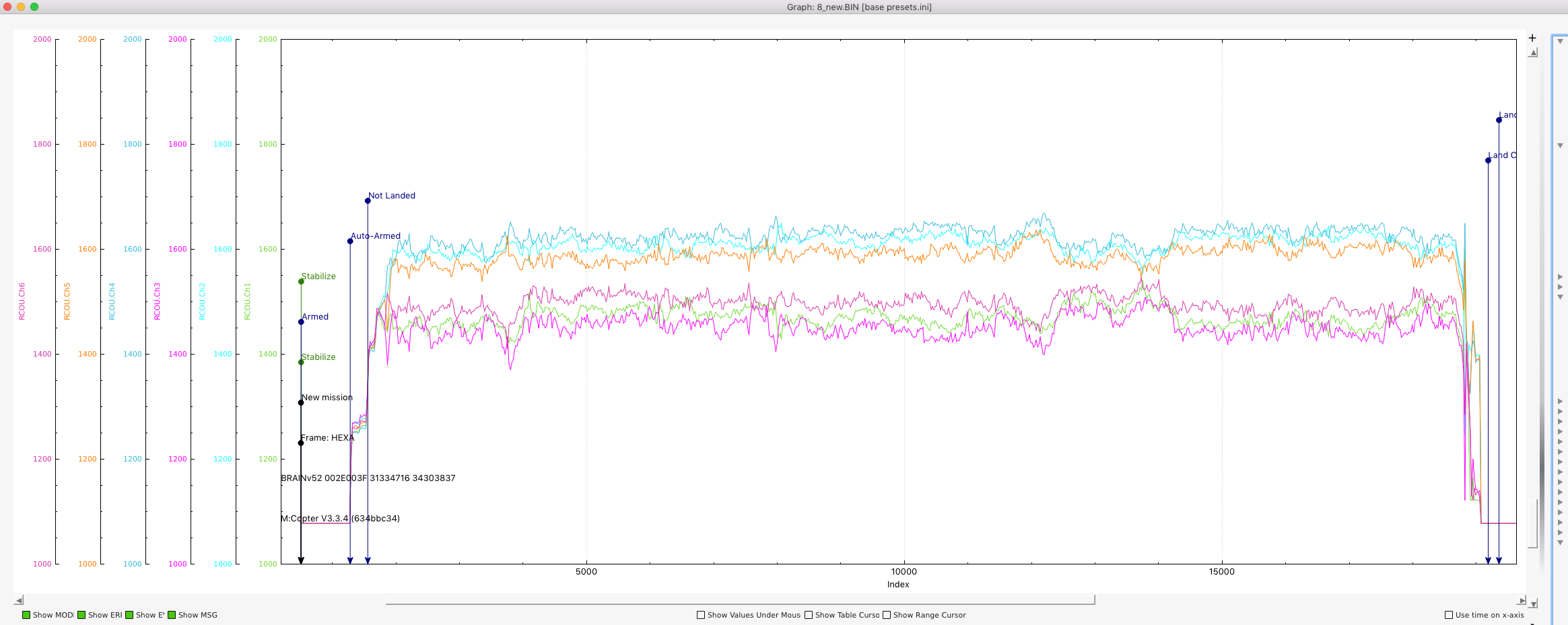
yesterday we have done another run and realized that
motors 1 & 3 & 6 are receiving similar pwm values but ch3 its continuously lower than the other two
motors 2 & 4 & 5 are receiving similar pwm values but ch5 its continuously lower than the other two
Ch3 and ch5 are the drone front. Being on the front and having lower values would cause the drone to lean forward and not backwards, how it is doing now.
maybe simonK firmware that is loaded on our esc´s is creating issues.
Do you know if esc’s give feedback about the pwm?
There are many ESC’s with differing features.
The only ones I am aware of that give feedback are the Castle Creations, which have a data logging function.
There may be others.
I usually just use a PWM meter on the PH output to verify vales and an RPM meter on the motor to verify effect.
@mboland
So, if we have the platform balanced i dont get why the pwm values are different. the different values are probalbly the reason for constant platform pitching but i cant get the cause. 
Can you explain the observed “pitching” in a bit more detail or share a video of it?
Hi @mboland . Attached the link to a short clip that shows what Im talking.
“https://www.dropbox.com/s/ip2p0biktcvzgh1/VID_20180228_190324.mp4?dl=0”
Firstly, you need to get the copter out of ground effect.
At least a metre high, as it is flying in its own disturbed air.
Connected to a GCS, is the horizon level?
You may need to do a level calibration in the Accelerometer section (just the level).
There does appear to be a problem with frame alignment.
Motors 1, 3 and 6, your clockwise motors, are lower than 2, 4 and 5, your counter clockwise motors.
Are the props the same?
Are the ESC producing the same rpm for a given PWM value?
Are you aware that you are flying an ‘X’ frame not a ‘+’ frame?
It looked like you were flying it in ‘+’ with a motor to the front but that may have just been the video point of view.
Get it in a clear area and up out of ground effect and have a look at your logs then.