is there a way to get the OSD to work through the Serial 4/5 on Pixhawk 1? I have Radio on Telem1, Frsky pass through on Telem2.
OSD can usually connect to the same port as a telemetry radio. Most OSDs only allow for Mavlink1 protocol and only require the TX connection (I think)
I have a MinimOSD on Serial 5. SERIAL5_PROTOCOL = 1 and SERIAL5_BAUD = 57. I needed both the RX and TX connected for it to work, for some reason.
Thanks I’ll give that a try
I have connected to 4/5 no problem. The only thing to watch out for is that AP only supports 3 mavlink streams from UARTS and the serial settings reflect the number of the stream not the number of the port. So if you have 3 mavlink streams you will be setting SR3_* if 2 streams then SR2*_ and so on.
How do you know which stream matches which UART? I wonder if that is why the OSD doesn’t fully work with only TX connected (I only see flight mode, all else are zeros) as it needs RX connected to request the proper stream rates.
Are you sure about this? Usually OSD don’t send the request for the streams rate. You can receive all the data only if the GCS is connect to the flight controller. Of course this depend which OSD firmware are you using.
There’s no matching - it’s simply based on the UARTs that have mavlink enabled on them. So look in MP at that and count up.
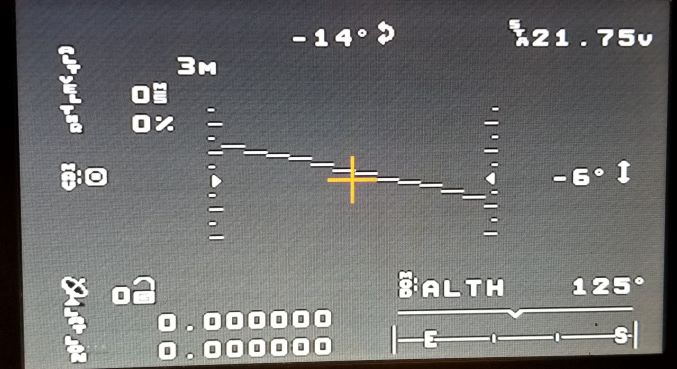
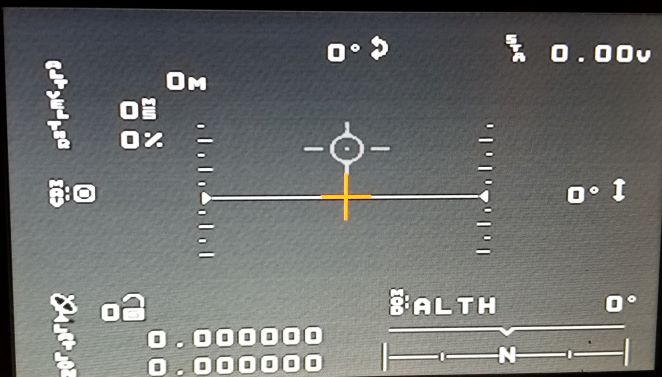
These photos show the OSD display with the TX and RX connected and below with just the TX connected. Without the RX, only the Flight Mode is correctly displayed and changes when the flight mode is displayed.
If each serial has a stream parameters, this means that each serial must receive the streaming request to send the data. Probably there is a default stream sent as a broadcast message for each connection …
Its really not that hard. Instead of using Serial 4/5, use a Y cable and run your telemetry radio and the OSD off of the same serial port. I’ve been doing it this way for years…
I have a Pixhawk setup with OSD and Telemetry radio on Telem1, Craft &Theory telemetry on Serial 4/5, and a STorm32 gimbal on Telem2.
A couple of things I’ve learned along the way:
- If you are using a minim or a MavLink OSD, do the RCTimer 5 volt mod and power the OSD from a separate +5 volt BEC. This does 2 things. First, the mod takes out the +12 volt input and makes the board run cooler. Second, powering from a separate BEC prevents loss of video during throttle changes.
2: MWOSD is much better than the old ArcuCam firmware. The firmware is free, but you need to cough up 2 pounds Sterling for the configurator. Cheap at the price if you ask me. Now more Arduino to compile code, its already done for you so flashing is a piece of cake. There are multiple builds with separate builds for the APM and PX4 flight stacks.