My hex copter with 32 inch prop oscillates while flying in normal modes whenever i add 8kg payload to it.
I am attaching 2 bin files one without payload and one with payload.
Please guide to make good flyable drone.
My hex copter with 32 inch prop oscillates while flying in normal modes whenever i add 8kg payload to it.
I am attaching 2 bin files one without payload and one with payload.
Please guide to make good flyable drone.
The tune on this is very poor with or without payload. I would start by setting the Rate filters to 10Hz, 8.5Hz is generally too low.
Hi, today i tried to manually tune my hex drone by using the initial param suggested by the mission planner by using my prop and battery specs. Then i have taken altitude hold where the drone seems good but when i switch to loiter mode and start giving little pitch and roll then it start behaving like a pendulum, after which i switch it back to altitude mode.
i am attaching the log files. Please have a look.
@dkemxr @Leonardthall @Eosbandi @sq-meng
I don’t get those initial parameters values when using 32" props and 12S. Try updating Mission Planner to latest Beta (button on the Help Screen) and try again. Some of those tuning parameters look too low. I suggested 8.5Hz for the rate filters was too low and you lowered them further.
ok, i will update my mission planner and fly that tomorrow. Also i am not able to understand how to solve this pendulum type oscillations.
is my problem simillar to this issue Large hexa, POS controller tuning (is it really the POS controller that needs tweaking?) - ArduCopter / Copter 3.6 - ArduPilot Discourse
I would reset the PID’s back to default and then set the proper initial tuning parameters. Make some flights to configure the Dynamic Notch Filter and then run Auto Tune.
ok, thanks i will do that
I have done the update of initial parameters and then the harmonic notch filtering.
After that done some manual tuning, now the drone without payload is performing better in alt hold and loiter, but there is an issue of toilet bowl in it.
Also i have flown with 10kg and 15kg payload, in which the 10 kg was not that smooth as compared to no payload but 15kg i was not able to get it up in stablize mode due to instability.
i am attaching all three logs below. Please have a look and guide further.
I’m skeptical that the notch frequency is set correctly at 174Hz for such a large craft. Post the log where you have INS_LOG_BAT_MASK set to 1 that you used to determine the filter parameters.
Tuning is very poor. You can see this for yourself by graphing Desire vs actual Pitch and Roll. If they don’t track well then tuning needs improvement. Why don’t you use Auto Tune? After confirming the Notch Filter is set correctly.
you can find the INS_LOG_BAT_MASK log below
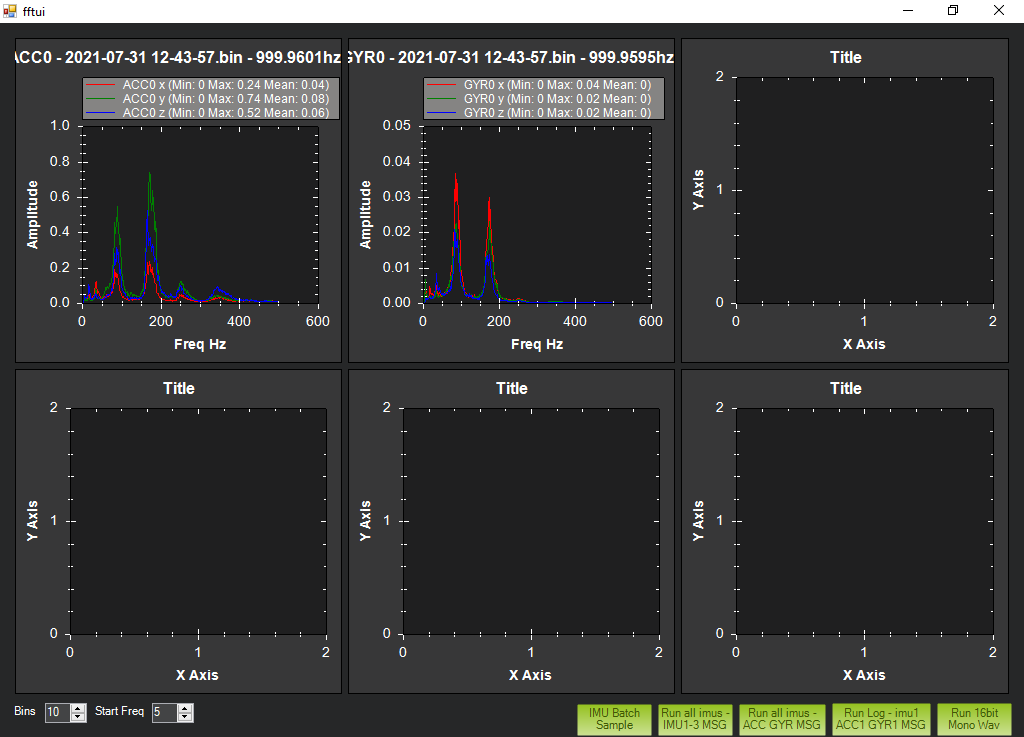
Pre-filter
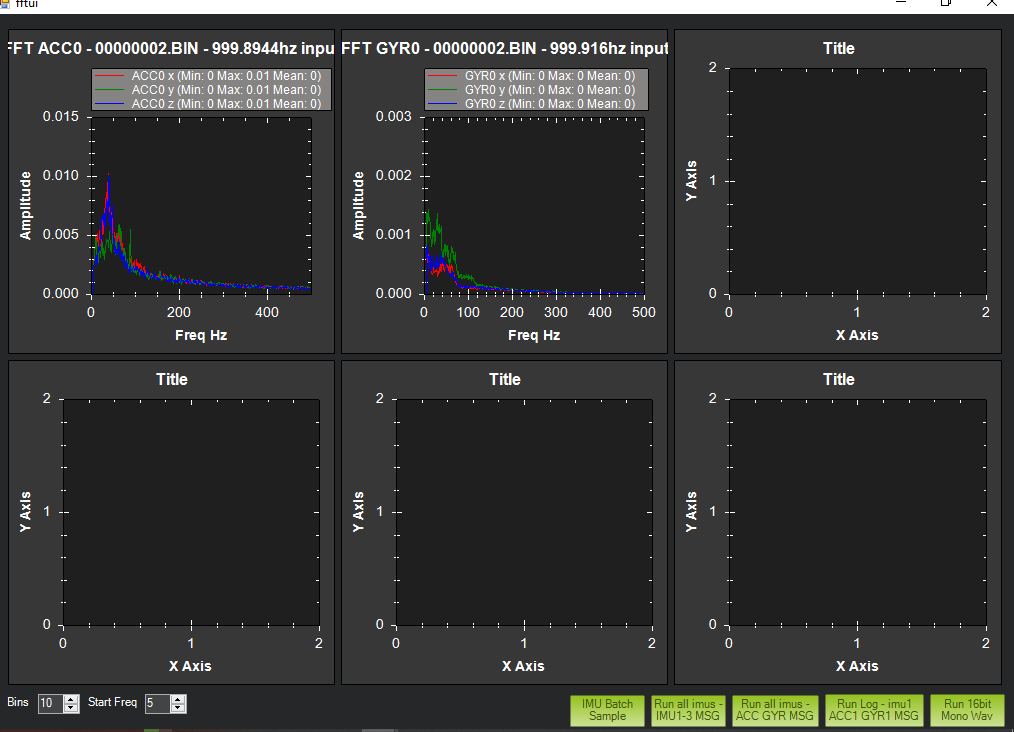
Post-filter
Also, today i have flown with10 kg again and did RTL after manual tuning as wind was high for auto-tune. 10kg fly fine but when i hang 15kg load to it the do not respond well and lead to drone damage. By god grace only 2 props were broken.
I am attaching the log below for your reference of both 10kg and 15kg.
The Notch frequency is the first peak of the FFT GYR0 graph (not the FFT ACC0 graph).
To me seams to be at around 95Hz. Correct it.
Once you get a proper tune with no payload, you need to change these parameters according to the payload change:
Once you drop the payload you need to change back to the initial parameters (with no payload)
Yea, you don’t have the notch set right if you used 174Hz.
And, on the log where you say it’s flying fine the tune is bad:
Roll
Actually i was giving the roll angle to drone to check if it re-stable it or not.
I will update my notch filter and fly today.
Also, other then auto-tune what can i do as the craft is big and weather is also not good, in auto-tune i might loose it completely.
Please guide.
In the above graph shared, there is an overshoot, so do i have to lower the rate of P or how to manually tweak it to get good results.
I would set the Rate PID’s back to default and then page down to Manual Tuning of Roll and Pitch here and work thru it with Transmitter Based Tuning:
Manual Tuning
I have done that and its flying fine now. Waiting for clear weather to auto tune it to get the perfect tune for it.
Thank you @dkemxr for your guidance.
Good posting.
it was really helpful for me.
I’m same as like your situation.
May I ask you , Your Multi-copter type and Spec?
Hi @AmitSingh where are you based?