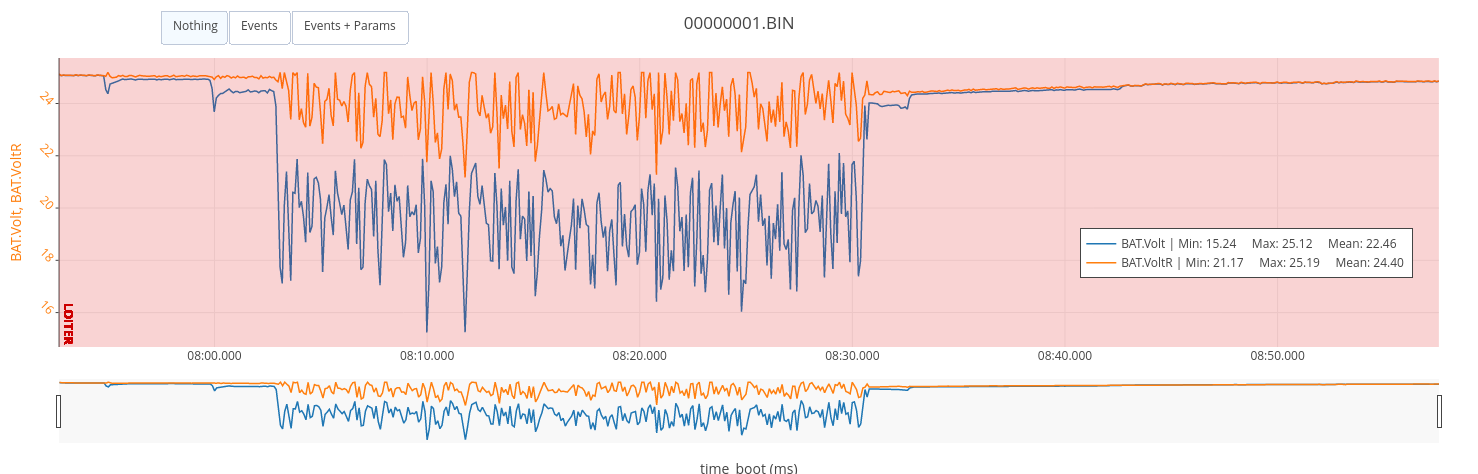
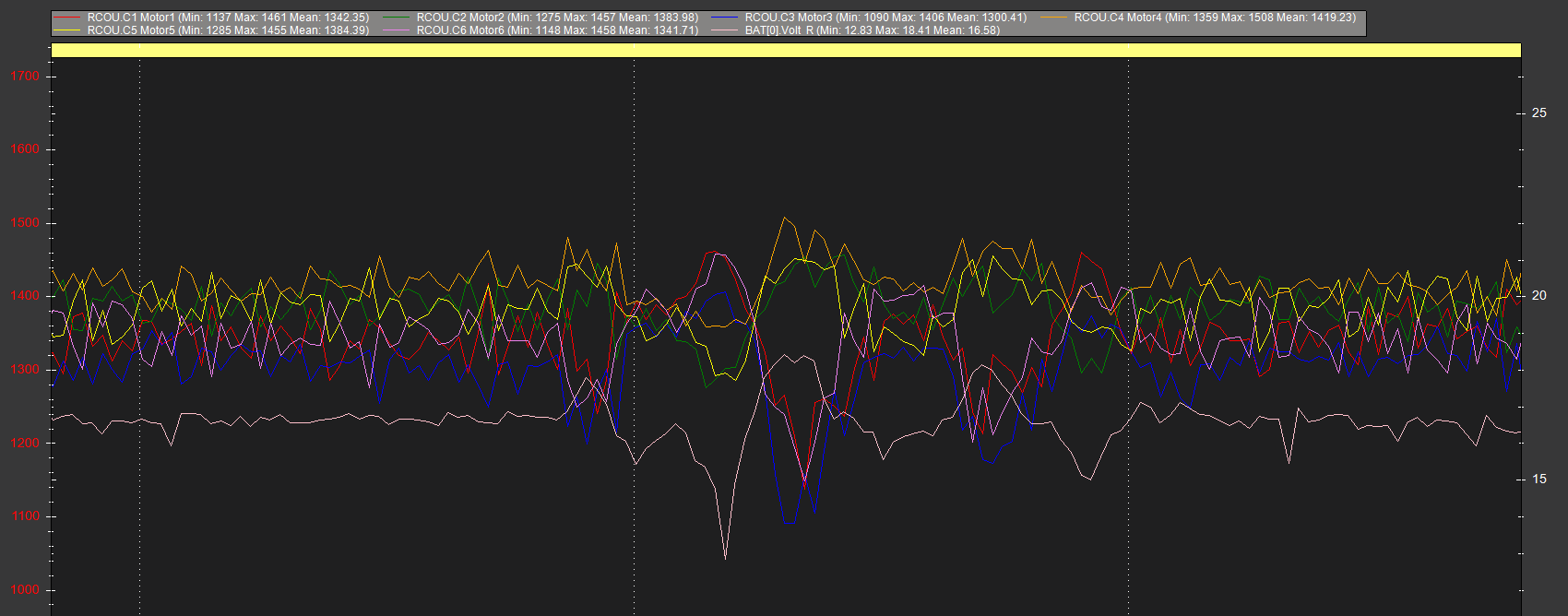
As suspected the voltage variations align with the wildly oscillating motor outputs, in particular it seems
- motor outputs 1, 3 and 6 go down= voltage goes up
- motor outputs 1, 3 and 6 go up= voltage goes down
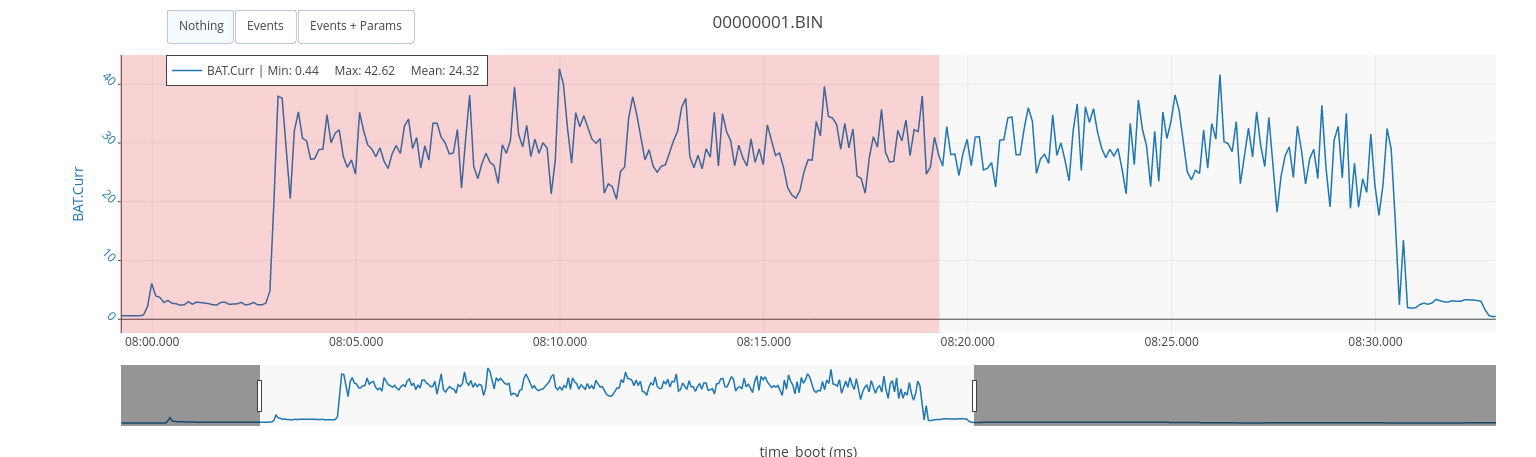
So those motors and ESCs might be drawing more current for some reason.
I’ve picked one of the cleanest sections here so it’s a bit more obvious
The voltage problem will sort itself out when you fix the vibrations that are causing the motor output oscillations.
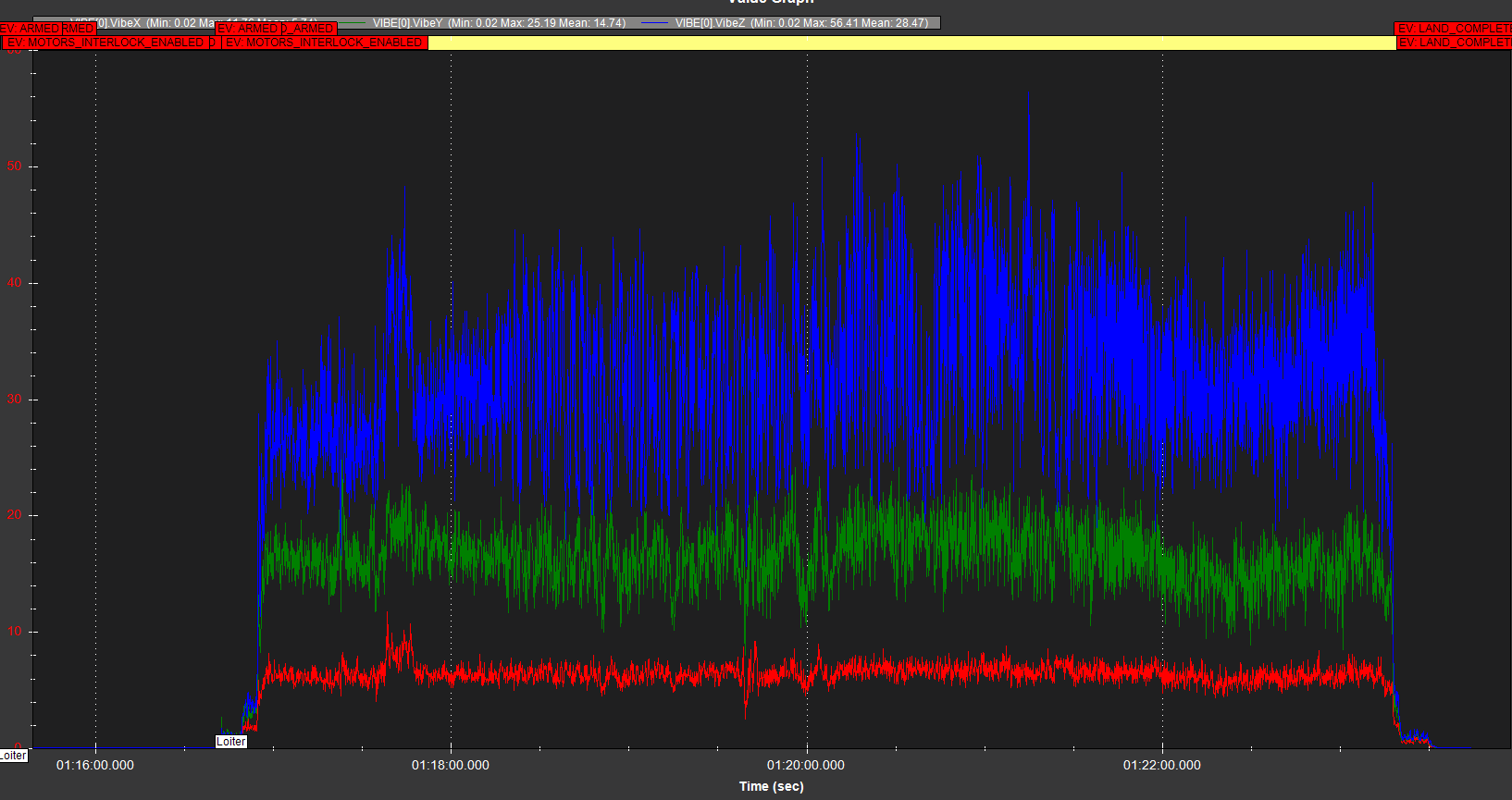
X axis vibes are good, but Y axis is going to bad, and Z axis is very bad and will likely cause a fly-away.
Do not fly again until you are certain vibrations are improved.
Look for wiring or something affecting the flight controller, such as pulled too tight or hanging around loose.
The Z axis vibrations are usually prop wash.
Motor balance and prop balance can contribute to all of those too.
Can you supply a photo of the flight controller mounting and surrounds?
Also please provide a few more details, like what props, motors and ESCs you have, and the frame too.
Set these before the next test flight:
- Upgrade to latest stable firmware
ARMING_CHECK,1
ATC_RAT_PIT_FLTD,13
ATC_RAT_PIT_FLTT,13
ATC_RAT_RLL_FLTD,13
ATC_RAT_RLL_FLTT,13
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,1
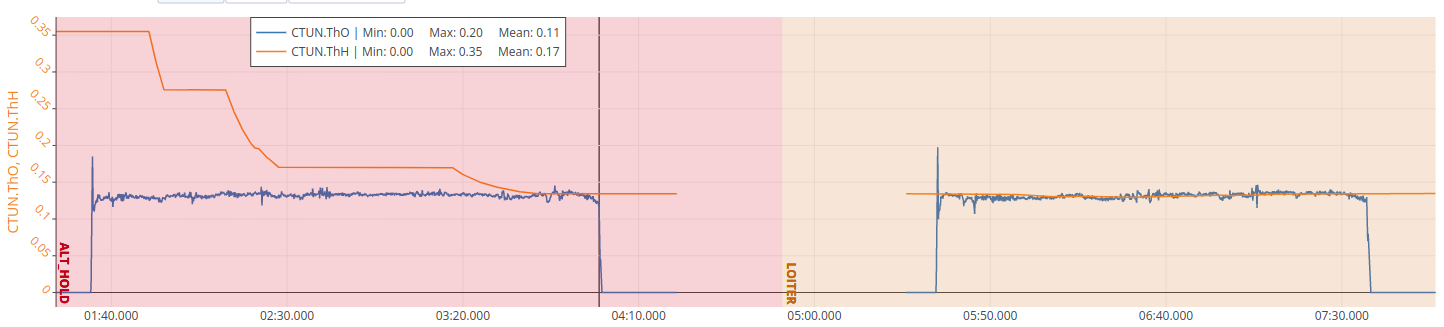
INS_HNTCH_REF,0.11
INS_HNTCH_FREQ,50
INS_HNTCH_BW,25
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Start in Stabilise mode for take off and some small pitch/roll movements. If everything is going OK then use AltHold mode and do some more gentle pitch and roll. Use Loiter in the same flight only if stability is very good.
Let’s see that .bin log file.